Программа «Контур»
Эксперименты по международной
программе «Контур» проводятся с 2009 года в рамках соглашения между «Роскосмосом»,
ЦНИИ РТК и DLR (германское космическое
агентство).
 Целью экспериментов является отработка технологий управления находящимися
на Земле роботами с борта орбитальной станции. В ходе проекта «Контур-1»
управление роботом, находящимся на МКС, осуществлялось с Земли. В
«Контуре-2» космонавт управлял роботом, находящимся на Земле. «Контур-3»
должен стать отработкой группового действия: команда космонавтов будет
управлять группировкой роботов, находящихся на Земле.
Целью экспериментов является отработка технологий управления находящимися
на Земле роботами с борта орбитальной станции. В ходе проекта «Контур-1»
управление роботом, находящимся на МКС, осуществлялось с Земли. В
«Контуре-2» космонавт управлял роботом, находящимся на Земле. «Контур-3»
должен стать отработкой группового действия: команда космонавтов будет
управлять группировкой роботов, находящихся на Земле.
«Суть не в том, чтобы робот передвигался по Луне – луноходы проделывали
это ещё в прошлом тысячелетии – идея в том, что оператор, находясь на орбите,
в режиме реального времени управляет движением робота на планете или спутнике
с помощью джойстика, – поясняет М.Гук, начальник отдела ЦНИИ РТК –
и
если робот встречает какое-то сопротивление окружающей среды, наталкивается
на препятствие, то человек ощущает это рукой в виде отдачи. Нет, это не
больно – просто будто рукой в стену уперся. Это и есть силомоментное очувствление».
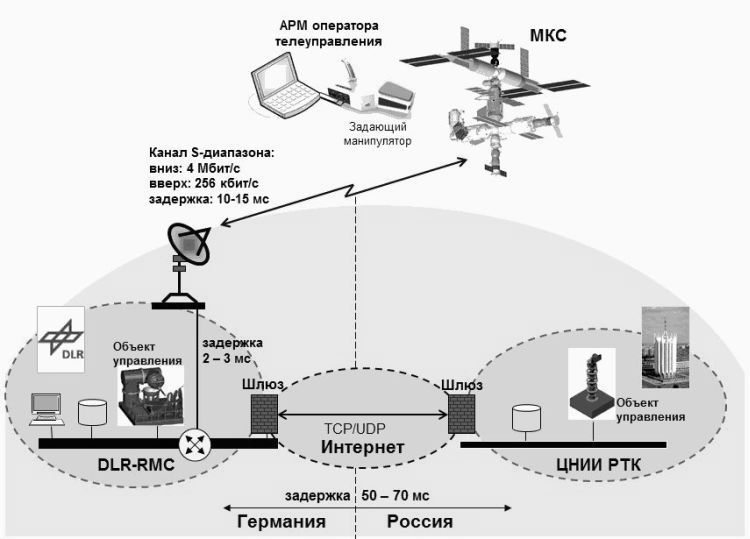
Рис. 1. Схема проекта
Российские роботы
связаны в систему – закреплённый на подвижной платформе гиперманипулятор/робот,
способный пролезть в отверстие и похожий на гигантскую змею или червя.
Как эта система будет двигаться, решает сам космонавт. Этот проект является
элементом подготовки к созданию базы на Луне для проведения там геологических
исследований и строительства лунной станции, где основные работы предстоит
выполнить роботам. Человек может работать на поверхности Луны около 5 часов.
Для создания лунной станции нужны месяцы, и эту задачу могут выполнить
роботы.

Рис. 2. Космонавт Олег Кононенко на МКС и Владимир Заборовский
на Земле
В проекте также
решена задача закрепления космонавта в конструкции, связанной с джойстиком,
так как без этого приложение усилий в условиях невесомости привело бы к
вращению человека вокруг ручки джойстика. Завкафедрой телематики ЦНИИ РТК
В.С. Заборовский так сказал об этом эксперименте: «Понятно, что на поверхности
Луны человеку сложно работать. Лунные базы должны собираться и компоноваться
роботами. Но кто-то должен управлять роботами. Поэтому мы сейчас отрабатываем
технологию, когда инопланетные роботы управляются с борта орбитальной станции».
В проекте
«Контур-1», в рамках которого было отработано управление роботом на поверхности
МКС, робот выполнял движение по контуру, не касаясь края металлической
плиты, вокруг которой двигался. Робот Роквис провёл на внешней поверхности
МКС семь лет, с 2004 по 2011 год. Тогда им управляли с Земли из ЦНИИ РТК.
«Это упражнение для космонавта на координацию движений», – уточнил
Заборовский. На орбите Луны может находиться пилотируемый зонд, из которого
люди будут дистанционно управлять роботами, собирающими станцию.
Проект по
управлению роботами с орбиты получил название «Контур-2». Эксперимент "Контур-2"
содержит 20 сеансов связи с МКС с роботами, которые находятся на земле
– в Германии и России. Проводит эксперимент ЦНИИ РТК, научное сопровождение
организует кафедра телематики. Российское ноу-хау состоит, по словам Заборовского,
в использовании облачных технологий, а также в конструкции джойстика, который
компенсирует задержку передачи данных с Земли на орбиту и обратно – при
небольшой задержке джойстик движется плавно, при увеличении задержки ручка
станет ходить туже.
19-20 августа
2015 г. сотрудники кафедры телематики успешно провели 3-ю серию экспериментов
по управлению роботом с борта космической станции. Космонавт Олег Кононенко,
находясь на орбите, руководил роботами в Петербурге и Мюнхене. На связь
с МКС ЦНИИ РТК выходили, когда станция входила в определённую временную
и географическую точку. Сеанс – всего восемь минут, за которые на Земле
должны были протестировать действия робота, которым из космоса при помощи
джойстика управлял космонавт. Сурикат (так назвали машину) должен был гасить
зажигающиеся вокруг него лампочки. Сложность этих манипуляций – в образующейся
задержке времени. Сейчас она составляет всего 0,1 с. Исследователи компенсируют
эту разницу силой, которую космонавт прикладывает, чтобы двигать джойстик.
Чем больше задержка, тем сложнее его перемещать. Таким образом, тактильные
ощущения становятся более реальными. Кононенко управлял с МКС не только
российским Сурикатом, но и немецким роботом. Его тестировали в Мюнхене.
Робот «Сурикат» в августовском эксперименте под управлением космонавта
Олега Кононенко гасил лампочки. Второй, «Юла», ведомый в декабре
уже космонавтом Сергеем Волковым, перемещался туда-сюда, обходя препятствия,
имитирующие поверхность планеты. Отдача в руке космонавта означала «туда
не ходи – сюда ходи». Словом, «ничего шибко полезного роботы не делали»,
задача была в отработке многоканальной связи: видео, тактильной и
аудио. «Это подходы к началу строительства лунных баз, – говорит
Михаил Гук. – Поначалу на Луне будет неуютно, и космонавт там работать
не сможет. Трудиться будут роботы – часть задач они будут выполнять автоматически,
другую часть – под присмотром оператора, находящегося на окололунной орбите».
Следующий
этап экспериментов предусматривает управление группировкой роботов, выполняющих
не только движение по планете, но и набор монтажных операций, позволяющих
собрать универсальный модуль для выполнения научных исследований.
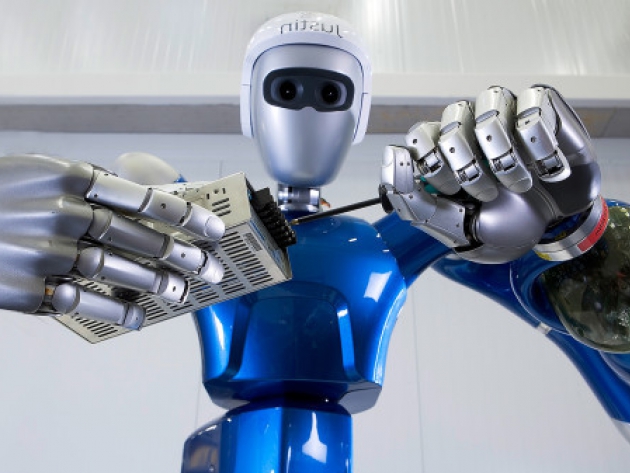
Рис. 3. Руками
робота в ЦНИИ РТК управляет с МКС космонавт С. Волков.
Роль Луны во время эксперимента играла Земля. Космонавт, находясь в российском
сегменте Международной космической станции, работал джойстиком, а на Земле
робот выполнял его команды. Чтобы управление удалось, потребовался
очень сложный канал связи. Сигнал шёл по радиоканалу с борта МКС на станцию
наземного слежения в ФРГ (немцы – партнеры по эксперименту), оттуда – в
Институт робототехники германского аэрокосмического агентства DLR-RMC и
через Интернет в ЦНИИ РТК к роботам.
Справка. Похожий эксперимент
выполняло и Европейское космическое агентство: датский космонавт Андреас
Могенсен с борта МКС также управлял наземными роботами. Но связь была со
значительно большей задержкой – 800 миллисекунд (наша – с задержкой 80
миллисекунд). Эксперимент Европейского космического агентства также был
«с очувствлением», но задача была поставлена таким образом, что робот
«должен был вставить щуп в дырочку, не ощутив никакого сопротивления среды.
Эксперимент по очувствлению, задача которого ничего не почувствовать, –
это несколько странно.
Далее был российско-немецкий эксперимент под названием «Двурукий «Джастин».
Человекоподобный робот «Джастин» находится в Германии в тамошнем аэрокосмическом
агентстве. Одной его рукой управлял из космоса Сергей Волков, другой –
из Петербурга Михаил Гук.

Рис. 4. Волков (МКС) и Гук
(ЦНИИ РТК) совместно управляют руками «Джастина» (каждый своей).
Это уже приближает эксперимент к реальным технологическим задачам, – несколько
человек могут решать более сложные задачи, – например, выполнять сборочные
операции на поверхности планеты. Такая операция была проделана в мире впервые.
Вообще впервые было сделано многое. К примеру, первое космическое рукопожатие:
семья космонавта Волкова приехала в Германию к роботу «Джастину»
и Волков рукой робота пожал руку супруге. (Снимки «космического рукопожатия»
можно увидеть на сайте Института робототехники германского аэрокосмического
агентства DLR-RMC: www.dlr.de)
Эксперимент «Контур-3» может занять года четыре – во всяком случае столько
прорабатывался «Контур-2» – это космические технологии. Регламенты подготовки
научной аппаратуры очень жёсткие, – изготовление устройств, сертификация
занимают много времени. Сейчас идёт согласование федеральной космической
программы до 2025 года, ЦНИИ РТК намерен участвовать в её разделе «Косморобот».
Эта НИР должна закончиться созданием опытного образца и его испытанием
в реальных условиях. То есть, видимо, до 2025 года «робот должен появиться
на Луне».
На Луне много полезных ископаемых – в частности, гелий-3, который
можно использовать в термоядерных реакторах, причём он не образует долгоживущих
радиоактивных отходов. И Луна сама по себе «колоссальная лаборатория,
где можно отрабатывать различные технологии, в том числе вырабатывать электроэнергию
и передавать на Землю».
В.С. Заборовский любезно предоставил нашему журналу
краткий фотоотчёт об этой работе:
 Более подробно
с материалами проекта можно ознакомиться в статье участников эксперимента
«Система телеуправления напланетными роботами с
борта МКС», приведённой в нашем журнале с согласия авторов, а также
в работе: В.С. Заборовский, М.Ю. Гук, В.А. Мулюха. «Применение киберфизического
подхода в задачах сетецентрического управления роботами» //Робототехника
и техническая кибернетика – 2014. – №2(3). – С. 12-18.
Более подробно
с материалами проекта можно ознакомиться в статье участников эксперимента
«Система телеуправления напланетными роботами с
борта МКС», приведённой в нашем журнале с согласия авторов, а также
в работе: В.С. Заборовский, М.Ю. Гук, В.А. Мулюха. «Применение киберфизического
подхода в задачах сетецентрического управления роботами» //Робототехника
и техническая кибернетика – 2014. – №2(3). – С. 12-18.
 В
оглавление
В
оглавление