Система
телеуправления напланетными роботами с борта МКС
Михаил Юрьевич Гук (m.gook@rtc.ru),
Владимир Сергеевич Заборовский (vlad@neva.ru),
Александр Витальевич Силиненко
(avs@rtc.ru), Олег Александрович Шмаков (shmakov@rtc.ru)
Аннотация.Обсуждаются
вопросы создания технологии удаленного управления роботами с обеспечением
эффекта телеприсутствия оператора в среде функционирования робота с использованием
визуальной и тактильной обратной связи в замкнутом контуре управления.
Материалы статьи основаны на результатах эксперимента «Контур-2», который
был посвящен созданию и отработке коммуникационной инфраструктуры для реализации
различных методов управления наземными роботами с борта Российского сегмента
МКС.
Ключевые слова:
космический эксперимент, телеприсутствие, силомоментная обратная связь,
управление с МКС наземными роботами.
Введение.
Получение научных данных о космосе, Земле и других небесных телах для развития
фундаментальной и прикладной наук и технологий, поддержания позиций России
в исследованиях Луны, Марса и других тел Солнечной системы невозможно без
развития космической робототехники. Вершиной достижений отечественных учёных
в этой области стали экспедиции межпланетных станций «Вега» по маршруту
Земля – Венера – комета Галлея в 1984-1985 гг. Станции «Вега-1» и
«Вега-2» высадили спускаемые аппараты и атмосферные аэростаты на Венере,
а затем направились навстречу комете Галлея, где впервые провели исследования
в непосредственной близости от ядра кометы. Полученные результаты показали,
что исследование космоса, как крайне враждебной среды для человека, целесообразно
проводить с помощью автоматических аппаратов. Опыт эксплуатации МКС свидетельствует,
что космонавт до 90% рабочего времени тратит на обслуживание своей орбитальной
станции. Фактически, полёт человека на любом обитаемом аппарате – это,
прежде всего, борьба за выживание, в которой на научные эксперименты у
космонавтов остаётся не так много времени.
Однако наступает новая индустриальная эпоха, получившая название Индустрия
4.0. По оценкам экспертов эта эпоха станет убедительным воплощением идей
кибер-физики, технологии «интернет-вещей» и сетецентрического подхода,
при котором объекты различного назначения функционируют в едином информационном
пространстве, предоставляя доступ к собственным ресурсам и используя удалённые.
Применительно к задачам исследования космоса это означает, что космические
аппараты нового поколения будут соединены каналами связи друг с другом
и с наземными центрами управления подобно тому, как в настоящее время соединены
узлы в Интернете. Такие аппараты будут совмещать в себе различные функции
от сенсоров до исполнительных устройств, обеспечивая человеку-оператору,
находящемуся в комфортных условиях, возможность телеприсутствия в зоне
проведения операций с учётом задержек в каналах связи. Очевидно, что приоритетная
цель национальной космической программы должна состоять в том, чтобы разработать
технологии, позволяющие создавать надёжные беспилотные космические аппараты-роботы,
оснащенные высокопроизводительными компьютерами, средствами связи и искусственного
интеллекта, позволяющими формировать многоцелевые сетецентрические группировки.
Такие группировки должны быть способны работать на околоземной орбите,
в дальнем космосе, на поверхности других планет или астероидов. Космические
аппараты – узлы космической сети должны быть оснащены надёжно работающим
программным обеспечением, объединяющим в динамическую информационную сеть
все вычислительные ресурсы орбитальных станций, автоматических аппаратов,
наземных пунктов управления, а также суперкомпьютеры исследовательских
центров.
Первым шагом к внедрению сетецентрического подхода в космосе является отработка
технологий космической связи и удалённого управления исполнительными устройствами
различного назначения. Впервые в мировой практике идея удалённого управления
космическим роботом через сети пакетной коммутации была реализована в рамках
Международного аэрокосмического форума IAF-97 в г. Турине при проведении
российско-итальянского эксперимента по управлению через транс-европейскую
компьютерную сеть ATM манипулятором космического корабля «Буран», который
находился на испытательном стенде ЦНИИ РТК в г. Санкт-Петербурге [1]. В
дальнейшем подобные исследования были продолжены в экспериментах ROKVISS
(2005-2008) и «Контур» (2008-2011).
В эксперименте ROKVISS [2], который проводился Германским центром авиации
и космонавтики (DLR), было реализовано управление с Земли двухшарнирным
роботом-манипулятором, расположенным на внешней поверхности Российского
сегмента (РС) МКС. Используемый радиоканал S-диапазона обеспечивал синхронную
передачу команд и данных телеметрии между роботом и наземным автоматизированным
рабочим местом (АРМ) оператора, включавшим в себя силомоментный джойстик.
Это позволяло имитировать режим телеприсутствия и отрабатывать технологию
силомоментного очувствления физических контактов исполнительного органа
робота с поверхностью экспериментальной контурной пластины.
а)  б)
б) 
Рисунок 1. Шарниры «ROKVISS»:
а) на внешней поверхности
РС МКС; б) на стенде ЦНИИ РТК
В совместном российско-германском эксперименте «Контур» [3] использовалась
инфраструктура сети передачи данных и сценарии эксперимента ROKVISS, но
при этом АРМ оператора было расположено в ЦНИИ РТК, а доступ к радиоканалу
обеспечивался через сеть Интернет. В ходе эксперимента отрабатывалось управление
в условиях существенных и нестационарных задержек в канале связи и высоком
проценте пропадания пакетов. После окончания эксперимента «Контур» шарниры
робота-манипулятора были демонтированы с внешней поверхности РС МКС и при
содействии РКК «Энергия» возвращены на Землю, где были разобраны и детально
изучены специалистами из ЦНИИ РТК и DLR. Уникальность шарниров заключается
в том, что, проработав 6 лет в открытом космосе, они остались в превосходном
состоянии, что позволило создать на их базе стенд для отработки силомоментного
управления, который в настоящее время находится в ЦНИИ РТК (см. рисунок
1).
В эксперименте «Контур-2» (2011-2016) робот и оператор поменялись местами:
теперь рабочее место оператора-космонавта находится на борту РС МКС, а
управляемые роботы – в научных лабораториях DLR и ЦНИИ РТК. Исследования
проводятся в рамках соглашения о сотрудничестве между Роскосмосом и DLR.
Отработка технологий
телеуправления наземными роботами с борта РС МКС в эксперименте «Контур-2».
Космический эксперимент «Контур-2» направлен на наращивание и использование
конкурентных преимуществ России в сфере космической деятельности на основе
использования Российского сегмента Международной космической станции для
отработки технологий управления робототехническими системами космического
назначения. Целью эксперимента «Контур-2» является отработка технологии
силомоментного телеуправления напланетными роботами с борта пилотируемого
орбитального комплекса с использованием комбинированных каналов связи для
обеспечения максимального эффекта телеприсутствия оператора в среде, окружающей
робота [4, 5]. Структурная схема эксперимента представлена на рисунке 2.
В рамках эксперимента были поставлены следующие задачи:
– разработать систему
телеуправления наземными роботами с борта РС МКС от задающего манипулятора
с обратной связью по силе/моменту с использованием коммуникационных каналов
с ограниченной пропускной способностью, наличием нестационарных задержек
и потерь пакетов;
– разработать автоматизированное
рабочее место на борту РС МКС, обеспечивающее телеуправление роботами на
Земле;
– исследовать особенности
человеко-машинного интерфейса с силомоментной обратной связью, используемого
для удаленного управления в условиях микрогравитации.
Эксперимент проводился совместно специалистами DLR, РКК «Энергия», и ЦНИИ
РТК во второй половине 2015 года. Тренировки экипажа осуществлял Центр
подготовки космонавтов имени Ю.А. Гагарина. Наземная подготовка эксперимента
велась с 2011 года. Для проведения эксперимента по заказу РКК «Энергия»
специалистами ЦНИИ РТК и DLR был разработан и изготовлен комплект научной
аппаратуры, включающий оборудование бортового и двух наземных сегментов.
На борт РС МКС был доставлен специально разработанный интеллектуальный
джойстик – задающий манипулятор (ЗМ) с силомоментной обратной связью (см.
рисунок 3), а также жёсткий диск с комплектом программно-математического
обеспечения (ПМО), исполняемого на бортовом лэптопе.
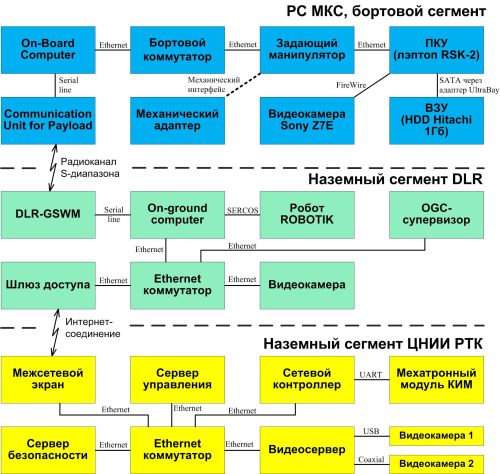
Рисунок 2. Структурная схема
эксперимента «Контур-2»
Основными элементами наземных сегментов являлись роботы. В сегменте ЦНИИ
РТК использовался кинематически-избыточный манипулятор (КИМ) [6] (см. рисунок
3), в сегменте DLR – двухстепенной робот ROBOTIC [2], являющийся квалификационной
моделью робота, использованного в эксперименте ROKVISS (см. рисунок 1).
Дополнительно в ходе проведения эксперимента были организованы сеансы управления
прототипом мобильного робота (ЦНИИ РТК) и антропоморфным роботом (DLR)
(см. рисунок 3). Эти роботы в совокупности с ЗМ позволяли выполнять манипуляции
с тактильной (силомоментной) обратной связью. Эффект телеприсутствия дополнялся
транслируемым видеоизображением на мониторе, а также динамической 3D-моделью
робота и окружающей среды; движение модели управлялось сигналами телеметрии.
а) б)
б)
в) г)
г)
Рисунок 3. а) силомоментный
задающий манипулятор; б) кинематически-избыточный манипулятор, г) прототип
мобильного робота; г) антропоморфный робот «Джастин» во время эксперимента
Сеансы эксперимента проводились во время нахождения МКС в зоне радиовидимости
наземной станции, расположенной в Вальхайме (Германия). Расчетная длительность
сеанса составляла 9 минут. Во время одного сеанса космонавт-оператор управлял
одним из роботов (DLR или ЦНИИ РТК). В ходе сеанса оператором выполнялись
различные манипуляционные задания: перемещение исполнительного органа робота
к указанным целям, «ощупывание» окружающей среды (панели заданий). В сеансах
управления мобильным роботом выполнялось движение по заданным траекториям
и осмотр окружающего пространства видеокамерой робота. Спецификой управления
с тактильной обратной связью и отдельным предметом эргономических исследований
являлось нахождение оператора в условиях микрогравитации.
Гетерогенная телекоммуникационная
инфраструктура.
Созданная телекоммуникационная инфраструктура обеспечивает передачу разнородного
трафика с приемлемым качеством сервиса для каждого из каналов управления
и обратной связи. Наиболее критичный к задержкам и пропускной способности
двунаправленный канал телеуправления обеспечивает суммарную задержку передачи
по контуру управления и обратной связи (RTT, Round Trip Time) в пределах
85 мс. На рисунке 4 приведены графики RTT для сеансов ЦНИИ РТК, как наиболее
тяжелых условий проведения эксперимента, поскольку в этой конфигурации
в канал связи входит сеть Интернет с недетерминированной задержкой. На
графиках видно изменение значений RTT в течении времени сеанса, связанное
с изменением расстояния от РС МКС до наземной станции.

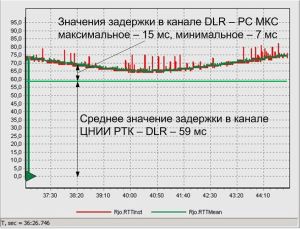
Рисунок 4. Мгновенные и
усредненные значения RTT в двух различных сеансах управления роботом КИМ
(ЦНИИ РТК).
В сеансах DLR значение RTT находилось в пределах 15-25 мс, при этом колебания
задержки (джиттер) были незначительными, что обусловлено отсутствием сети
Интернет в канале передачи данных. Пропускная способность канала визуальной
обратной связи обеспечивает передачу как чёрно-белого, так и цветного изображения
к оператору с приемлемым качеством изображения и частотой обновления кадров.
Каналы обмена служебной информацией обеспечивают текстовый диалог в реальном
времени, а также возможность дистанционного управления заданиями и параметрами
ЗМ. Дополнительные каналы двусторонней голосовой связи и видеотрансляции
с борта орбитальной станции, организованные в ходе проведения эксперимента,
показали свою эффективность для отработки согласованных действий двух пространственно-разнесённых
операторов при решении задач кооперативного управления.
Комбинация тактильной
и визуальной обратной связи.
Созданная система телеуправления обеспечивает дистанционное управление
в ручном режиме с борта РС МКС роботами, находящимися на Земле. Оператор
на борту РС МКС получает обратную связь (ОС) от робота, функционирующего
в своей окружающей среде, по нескольким каналам:
– тактильная ОС, обеспечиваемая передачей информации между контроллерами
приводов робота и джойстика. Функционирование контроллеров в режиме реального
времени и выделение данного информационного потока в приоритетный канал
обеспечивает передачу информации о механическом взаимодействии робота с
окружающей средой с минимальной задержкой. Этот вид ОС даёт оператору тактильную
информацию о направлении и силе воздействия окружающей среды на рабочий
орган робота;
– визуальная ОС, получаемая путём трансляции видеоизображения с камеры,
установленной на роботе, или с обзорной камеры. Для данного вида ОС определён
баланс между качеством передаваемого изображения, частотой его обновления
и задержкой формирования изображения для оператора при наличии существенных
ограничений на пропускную способность канала связи (пропускная способность
потока на Землю составляет 4 Мбит/с, на борт МКС – 256 кбит/с). В
связи с необходимостью применения алгоритмов сжатия информации данный вид
ОС даёт существенное запаздывание, обусловленное обработкой данных на передающей
и принимающей сторонах;
– визуальная ОС, получаемая путем визуализации движения модели робота на
экране лэптопа оператора. В сеансах управления роботом КИМ для анимации
3D-модели использовалась телеметрическая информация, поступающая от робота
по приоритетному каналу, что обеспечивало малые задержки отображения. В
сеансах управления прототипом мобильного робота использовалась плоская
модель (карта), информация для которой передавалась с наземной системы
технического зрения, наблюдавшей движение робота в окружающем пространстве.
Компактность передаваемых данных позволяет при малом расходовании полосы
пропускания канала обеспечить более высокую частоту обновления изображения
(по сравнению с видео), что существенно улучшает динамичность представления
картины окружающего пространства.
Эффективность комбинирования нескольких видов обратной связи – тактильной
(усилие в рукоятке ЗМ) и визуальной (видео и модель на экране), – дополняющих
друг друга для обеспечения виртуального погружения оператора в среду функционирования
робота, подтверждена успешным выполнением манипуляционных и локомоционных
заданий в проведённых сеансах телеуправления.
В сеансах кооперативного управления роботом «Джастин» для обеспечения согласованности
действий операторов, находящихся на РС МКС и в ЦНИИ РТК, существенно удаленных
как друг от друга, так и от объекта управления (в DLR), была успешно применена
голосовая связь между космонавтом и наземным оператором, организованная
с помощью созданной телекоммуникационной инфраструктуры.
Использование силомоментного
ЗМ в условиях микрогравитации.
Силомоментный ЗМ в эксперименте использовался в составе разных систем телеуправления,
предназначенных для управления разнотипными роботами. Архитектура ПМО позволяет
выбирать структуру контроллера ЗМ в зависимости от текущего сеанса (DLR
или ЦНИИ РТК) и динамически изменять его параметры во время сеанса.
Для управления роботом «ROBOTIC» используется система билатерального управления
DLR с 4-канальной архитектурой: от ЗМ к роботу передаются величины скорости
рукоятки и силы воздействия на неё оператором, в обратном направлении передается
вычисленная сила, приводящая в движение шарниры робота, и измеренная сила
воздействия на шарниры окружающей среды. Данные сигналы передаются для
каждой из двух степеней свободы.
Выбранная архитектура обеспечивает эффективную передачу оператору ощущений
от контактов щупа (стилуса) робота с окружающей средой. Стабильность (отсутствие
колебаний) замкнутой системы, в контуре которой присутствуют существенные
задержки, обеспечиваются контроллерами пассивности, установленными на обеих
сторонах (ЗМ и робот).
В ходе проведенных сеансов было установлено, что в условиях микрогравитации
ряд параметров контроллера ЗМ, связанных с биомеханическими параметрами
человека-оператора, для обеспечения наибольшей «прозрачности» телеприсутствия
должен быть скорректирован относительно «земных» настроек.
а)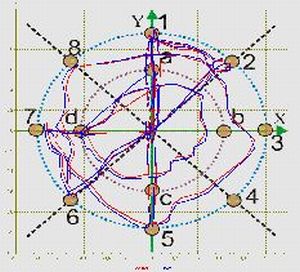 б)
б)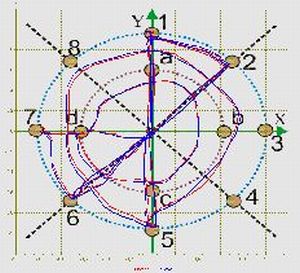
Рисунок 5. Траектории движения
рукоятки ЗМ (Master) и робота КИМ (Slave)
а) без силомоментной ОС;
б) с виртуальной пружиной и массой.
Для управления роботом КИМ используется двухканальная архитектура управления
с контроллерами, разработанными в ЦНИИ РТК: между ЗМ и роботом передаётся
информация о текущих координатах. Контроллер ЗМ позволяет реализовать на
рукоятке виртуальную пружину, связывающую положение рукоятки ЗМ и робота.
Кроме того, обеспечивается очувствление виртуальной массы и вязкости. Введение
силомоментной обратной связи для управления роботом КИМ, не имеющим силомоментных
приводов и датчиков, даёт положительные результаты в виде повышения скорости
и точности выполнения операций. На рисунке 5 приведены траектории движения
рукоятки ЗМ и робота КИМ при отсутствии и наличии силомоментной обратной
связи во время выполнения одного и того же задания в сеансах КЭ.
Для управления прототипом мобильного робота контроллер ЦНИИ РТК был реконфигурирован
на иной вариант двухканальной архитектуры: от ЗМ передаются его текущие
координаты, определяющие направление и скорость движения робота. На ЗМ
передается информация от наземного сервера модели, определяющая силу, отталкивающую
робота от близлежащих препятствий, спроецированной на продольную ось робота.
Эта сила является аддитивной составляющей, позволяющей на тактильном уровне
ориентироваться на местности и обходить препятствия при движении. Виртуальная
пружина, масса и вязкость рукоятки создают комфортные ощущения оператору
при движении в открытом пространстве, что было подтверждено космонавтом
О.Д. Кононенко после выполнения им одного из сеансов. В ходе выполнения
сеансов обнаружилось, что параметры контроллера ЗМ, обеспечивающие эффективное
управление роботом, для оператора, находящегося в условиях микрогравитации,
отличаются от настроек, принятых при наземной отработке.
Универсальная система
телеуправления роботами.
Система телеуправления с силомоментным ЗМ, изначально разработанная для
двух роботов (ROBOTIC и КИМ) с соответствующими контроллерами DLR и ЦНИИ
РТК, после успешного проведения серии сеансов, в дальнейшем была использована
для управления иными роботами. Прототип легкого мобильного робота, в отличие
от манипулятора КИМ, требует применения позиционно-скоростного управления:
оператор управляет направлением движения, а не позицией робота. Задача
управления роботом с числом степеней подвижности, превышающим число степеней
подвижности ЗМ, решается с помощью управления текущим отображением степеней
свободы ЗМ на степени подвижности робота посредством мини-джойстика, расположенного
на рукоятке ЗМ. Смена отображения, сопровождаемая переключением структуры
и набора параметров контроллеров ЗМ и робота, производится оператором-космонавтом.
При управлении антропоморфным роботом «Джастин» было использовано фиксированное
отображение двух координат ЗМ на два шарнира робота, а мини-джойстик (четырехпозиционный
переключатель на рукоятке ЗМ) использовался для управления движением головы
с встроенной в неё видеокамерой. В сеансе кооперативного управления использовалось
два пространственно-разнесенных ЗМ (на борту РС МКС – управление правой
рукой, в ЦНИИ РТК – управление левой рукой робота). Таким образом, продемонстрирована
универсальность разработанной системы телеуправления, позволяющая использовать
один и тот же двухстепенной задающий манипулятор с силомоментной обратной
связью для управления роботами, различающимися по назначению, числу степеней
свободы и кинематическим схемам.
Гибкость и модернизируемость
системы телеуправления.
Система (системы) телеуправления напланетными роботами, созданная в период
подготовки эксперимента, продемонстрировала свою работоспособность в конфигурации,
предусмотренной в техническом задании. Аппаратура, доставленная на борт
РС МКС, начала штатное функционирование сразу после выполнения процедур
установки и включения, что было проверено в первых же сеансах эксперимента.
Вместе с тем для развития эксперимента потребовалось выполнить обновление
ПМО как в бортовом, так и в наземных сегментах. Для обеспечения тестирования
обновлённого ПМО и отработки методик его использования развернута наземная
инфраструктура, связывающая DLR (Германия), ЦНИИ РТК (С. Петербург), стенд
ИУС НКО РКК Энергия (г. Королёв) и стенд ИУС в ЦПК (Звёздный городок).
Данная инфраструктура, включающая, в частности, и средства ограничения
доступа (шлюзы и межсетевые экраны), позволяет отрабатывать задачи управления
роботами, находящимися в ЦНИИ РТК и в DLR, из любого из указанных наземных
пунктов, равно как и с борта РС МКС. Разработана и опробована система обновлёний
ПМО бортового сегмента с использованием как штатного канала связи с МКС,
так и сторонних средств (передача радиограммы на борт). Созданная инфраструктура
связи с бортом РС МКС может быть использована для проведения экспериментов
различного назначения, как в существующем виде, так и с необходимыми модификациями
в пределах пропускной способности радиоканала S-диапазона.
Основные результаты
эксперимента «Контур-2».
Всего с августа по декабрь 2015 года было проведено 23 сеанса управления,
из которых:
– 9 сеансов DLR по отработке управления роботом ROBOTIC;
– 4 сеанса ЦНИИ РТК по отработке управления роботом КИМ;
– 5 сеансов ЦНИИ РТК по отработке управления прототипом мобильного робота
[7];
– 5 сеансов DLR и ЦНИИ РТК по кооперативному управлению антропоморфным
роботом «Джастин», находившимся в DLR.
В этих сеансах отрабатывались совместные действия группой операторов, один
из которых находился на борту РС МКС, второй – в ЦНИИ РТК. На рисунке 6
представлены фотографии российских космонавтов на борту РС МКС во время
выполнения заданий в рамках эксперимента «Контур-2».
а) б)
б)
Рисунок 6. Космонавты во
время проведения сеансов эксперимента «Контур-2»:
а) О.Д. Кононенко; б) С.А.
Волков.
Во время проведения эксперимента «Контур-2» были установлены мировые достижения
в области телеуправления с борта МКС наземными динамическими объектами
с применением двухстепенного задающего устройства с силомоментной обратной
связью:
– август
2015 – высокочувствительное телеуправление (High Fidelity Telepresence)
роботом ROBOTIC, DLR;
– август
2015 – управление манипулятором с борта МКС через Интернет (робот КИМ,
ЦНИИ РТК);
– октябрь
2015 – управление мобильным роботом с борта МКС через Интернет (робот «Юла»,
ЦНИИ РТК). В эксперименте ЕКА (сентябрь 2015) был реализован аналогичный
сценарий, при этом одностепенной ЗМ «Haptic» использовался только для управления
манипулятором наземного робота;
– ноябрь
2015 – управление антропоморфным манипулятором с борта МКС (робот «Джастин»,
DLR);
– ноябрь
2015 – кооперативное управление антропоморфным манипулятором с борта МКС
и из ЦНИИ РТК (робот «Джастин», DLR –ЦНИИ РТК).
Основными научно-техническими результатами проделанных сеансов являются:
– двухканальная
(ЦНИИ РТК, [5]) и четырехканальная (DLR) системы телеуправления наземными
роботами с борта РС МКС;
– верифицированные
параметры моделей систем телеуправления ЦНИИ РТК и DLR, обеспечивающих
тактильную обратную связь с сохранением устойчивости системы при задержках
в канале управления до 85 мс;
– подтверждение
целесообразности использования силомоментного ЗМ для управления робототехническими
объектами в условиях микрогравитации;
– доказательство
эффективности применения комбинации тактильной и визуальной обратной связи
в замкнутом контуре управления, включающем человека-оператора, работающего
в условиях микрогравитации;
– подтверждение
пригодности созданной гетерогенной распределенной телекоммуникационной
системы в качестве инфраструктуры для удаленного управления наземными робототехническими
объектами с борта РС МКС;
– подтверждение
пригодности разработанной системы для телеуправления роботами, различающимися
по назначению, числу степеней свободы и кинематическим схемам, от двухстепенного
силомоментного ЗМ;
– подтверждение гибкости
и модернизируемости разработанной системы телеуправления, включая возможность
удаленного реконфигурирования и настройки элементов автоматизированного
рабочего места оператора на борту РС МКС;
– отработанная
технология управления космическим экспериментом по робототехнике, включая
планирование сеансов с учетом существенного числа ограничений, моделирование
«затенений» системы S-диапазона элементами конструкции МКС, а также подготовку
экипажа станции.
Заключение.
В рамках эксперимента «Контур-2» были успешно отработаны научно-технические
задачи создания технологий телеуправления напланетными робототехническими
системами в условиях космического полёта. Создана сетевая инфраструктура
управления наземными роботами с борта РС МКС. Впервые были проведены сеансы
управления с борта РС МКС наземными динамическими объектами с применением
двухстепенного задающего устройства с силомоментной обратной связью. Освоенные
технологии предназначены для робототехнических систем космического назначения
при реализации орбитальных и напланетных миссий.
Эксперимент «Контур-2» является очередным этапом развития сетецентрического
подхода к задачам комплексного исследования космического пространства.
В частности, одним из сценариев освоения поверхности Луны и строительства
обитаемой базы является использование группировки автономных роботов, которые
контролируются и при необходимости управляются в режиме телеприсутствия
с борта орбитального пилотируемого космического аппарата и из наземных
центров управления. Проведенные исследования показали эффективность такого
подхода.
Список литературы
-
Международный АТМ-проект с участием
России / В.С. Заборовский., Ю.Е. Подгурский, В.Б. Семеновский // Глобальные
сети и телекоммуникации. №10, 1998. – С. 56-58.
-
ROKVISS – robotics component
verification on ISS current experimental results on parameter identification
/ А. Albu-Schaeffer, W. Bertleff, B. Rebele, B. Schaefer, K. Landzettel,
G. Hirzinger // IEEE International Conference Robotics and Automation.
– 2006. – P. 3879-3885.
-
Эксперимент «Контур» на Российском
сегменте МКС [Электронный ресурс] / К. Ландцеттель, В.С. Заборовский, А.С.
Кондратьев, А.В. Силиненко, М.Ю. Беляев, Е.В. Бабкин // ГМИК им. К.Э. Циолковского.
Научные чтения памяти К.Э. Циолковского, г. Калуга. – 16.09.2009.
-
«Контур-2» - совместный российско-германский
космический эксперимент по силомоментному управлению наземными роботами
с борта МКС / М.Ю. Гук, А.В. Силиненко // Труды международной научно-технической
конференции «Экстремальная робототехника», 1-2 октября 2014, Санкт-Петербург:
Изд-во «Политехника-сервис», 2014. – С. 59-64.
-
Телеуправление напланетными
роботами с борта МКС в рамках космического эксперимента «Контур-2» / Заборовский
В.С., Гук М.Ю., Мулюха В.А., Силиненко А.В., О.Н. Волков, М.Ю. Беляев //
Труды международной научно-практической конференции «Научные исследования
и эксперименты на МКС», 9-11 апреля 2015, Москва: Изд-во ИКИ РАН, 2015.
– С. 64-65.
-
Позиционное управление кинематически
гиперизбыточным манипулятором: моделирование и физический эксперимент /
А.А. Иванов, С.А. Ноздрин, О.А Шмаков // Сборник материалов 4-й Всероссийской
мультиконференции по проблемам управления МКПУ-2011, 4-6 октября 2011,
с. Дивноморск, Геленджик, Краснодарский край, 2011.
-
Разработка реконфигурируемого
малогабаритного робота на базе двухколесного модуля / О.А. Шмаков, А.В.
Рогов, Д.А. Демидов, А.В. Рачицкий // Актуальные проблемы защиты и безопасности:
Труды XVIII Всероссийской научно-практической конференции РАРАН (1 – 4
апреля 2015 г.), Издание ФГБУ «Российская академия ракетных и артиллерийских
наук». Москва – 2015.
 к
основной статье
к
основной статье