Движители
«псевдонасекомых»
Лема
Швейцарская корпорация K-Team получила от Гарвардского университета лицензию
на выпуск недорогих роботов по имени Kilobot. Вдохновлён Kilobot был талантами
общественных насекомых вроде муравьёв и пчёл.
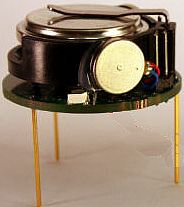
Рис. 1. «Килобот»
Как и живые создания, «килоботы» умеют сообща разыскивать еду, передавая
данные о ней друг другу, разбегаться врассыпную и собираться в стаю, следовать
за лидером, обходить друг друга по заданной траектории, совместно толкать
предметы и так далее.
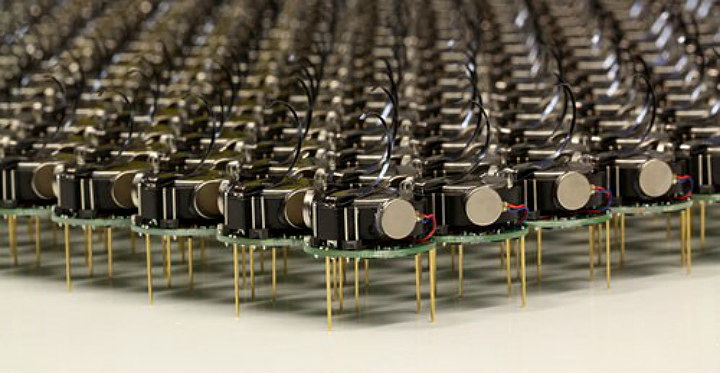
Рис. 2. «Стая килоботов»
По существу, это простейший прототип аналога элемента «кибертуч» Станислава
Лема из фантастической повести «Непобедимый». Вот как выглядели (по Лему)
«псевдонасекомые»: «Все эти создания обладали тройственной симметрией
и напоминали букву Y с тремя остроконечными плечами, соединяющимися в центральном
утолщении... Каждый кристаллик соединялся с тремя; кроме того, он мог соединяться
концом плеча с центральной частью любого другого, что давало возможность
образования многослойных комплексов... При определённом количестве насекомых
система начинала проявлять многочисленные закономерности; могла в зависимости
от того, как её «дразнили» внешними импульсами, менять направление движения,
форму, вид, частоту внутренних пульсаций; при определённых внешних условиях
менялись знаки поля и, вместо того чтобы притягиваться, металлические кристаллики
отталкивались, переходили в состояние «индивидуальной россыпи»...»
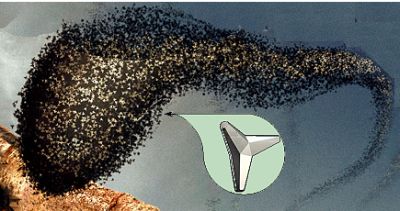
Рис. 3. «Кибертуча»
и «псевдонасекомое» (по иллюстрации А. Андреева)
По-видимому, именно такая форма элемента
необходима и достаточна для образования сколь угодно сложных, пространственно
протяжённых и в то же время лёгких, ажурных комплексов. Аналогия
со стаей «килоботов» полная: чем больше ансамбль, тем более сложные программы
он может реализовать, в том числе, программы самообучения и элементы искусственного
интеллекта. Существенно различие в способе движения
– «килоботы» движутся посредством
вибрации ножек по плоскости, и поэтому могут создавать только двумерные
структуры, а «псевдонасекомые» Лема летают и могут создавать объёмные конструкции,
наращивая свою «кибермощность» гораздо эффективнее.
Движитель «псевдонасекомых» по Лему выглядит так:...«они создавали то
электрическое, то магнитное поле, то переменные силовые поля, которые могли
нагревать до относительно высокой температуры центральную часть; тогда
накопленное тепло излучалось наружу однонаправленно. Вызванное этим движение
воздуха, как реактивная струя, делало возможным движение в любом направлении...
Отдельный кристаллик не столько летал, сколько подпрыгивал... Несколько
же кристалликов, соединяясь кончиками плеч друг с другом, образовывали
систему с тем лучшими аэродинамическими качествами, чем больше их было».
Описание движителя у Лема довольно лапидарно (во время написания повести
инфракрасных лазеров ещё не существовало), тем не менее, оно вполне может
служить отправным пунктом для конкретной конструкции. Вместо не очень вразумительного
высокотемпературного нагрева центральной части с «однонаправленным» излучением
тепла можно поставить современный инфракрасный полупроводниковый лазер...
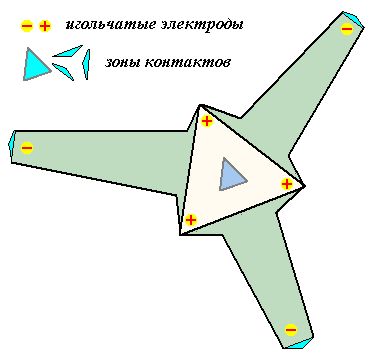
Рис. 4. Другой вариант
«псевдонасекомого» (четвёртая пирамида скрыта октаэдром)
Вариант с лазером приемлем, однако, его лучом трудно управлять. Гораздо
проще в управлении ионный движитель, показанный на рис. 4. «Псевдонасекомое»
представляет собой правильный октаэдр, на 4-х несмежных гранях которого
помещены трёхгранные усечённые пирамиды, осуществляющие необходимые контакты
(как между плоскими верхушками пирамид, так и с центральными свободными
гранями). На рисунке это «зоны контактов». На свободных от пирамид гранях
и на гранях пирамид есть игольчатые электроды, способные создавать тлеющий
разряд. Направление возникающего при этом ионного ветра будут определять
потенциалы игольчатых электродов в пределах центрального телесного угла,
охватывающего свободную грань. Управлять таким ветром проще, чем лазерным
лучом, да и передаваемый импульс меньше зависит от внешних воздушных потоков.
 В оглавление
В оглавление