В.А. Коноваленко
Управление
вектором тяги солнечного паруса
Идея полётов в космосе с использованием
солнечного паруса появилась в России (ещё в 1920 г.) – она принадлежит
одному из пионеров ракетостроения Фридриху Цандеру. Но первый опыт создания
солнечного паруса был предпринят только в 1993 г. – в российском эксперименте
«Знамя-2». Большая 20-метровая тонкоплёночная конструкция была развернута
за счёт центробежных сил на борту грузового космического корабля «Прогресс
М-15».
В 2004 году лидером
в практическом воплощении работ по созданию космических аппаратов с солнечным
парусом становится Япония – она успешно развернула в космосе два прототипа
солнечных парусов. Тест, однако, был кратковременным, поэтому можно сказать,
что паруса не успели показать себя в работе, т.е. приобрести измеримое
ускорение. Теперь же главная цель японских инженеров – демонстрация маневрирования
и значительных изменений орбиты при помощи солнечного паруса в ходе его
полёта к Венере.
На эту фазу испытаний IKAROS'у
отводится шесть месяцев. Парус IKAROS'а представляет собой квадрат со сторонами
чуть больше 14 метров, созданный из полиамидной плёнки. В нескольких местах
к этой мембране добавлены ультратонкие солнечные батареи. Они питают различные
приборы парусника.
IKAROS – это
первый солнечный парусник за пределами околоземной орбиты. Он же – первый,
в котором будут совмещены двигательные возможности космического паруса
с его использованием в качестве солнечной батареи. Очередной японский проект
по созданию солнечного паруса – межпланетный зонд с парусом и ионными двигателями,
которые помогут солнечному паруснику маневрировать на пути к месту назначения
и непосредственно около него, должен достичь Юпитера и Троянских астероидов.
Причина столь больших интервалов
между появлением идеи и её реализацией – сложность маневрирования. Именно
поэтому японцы намереваются оснастить парусник ионными двигателями. Этакая
каравелла с атомным реактором. Между тем, может быть построено устройство
для управления вектором тяги солнечного паруса безо всяких дополнительных
двигателей. Его конструкция показана на рис. 1.
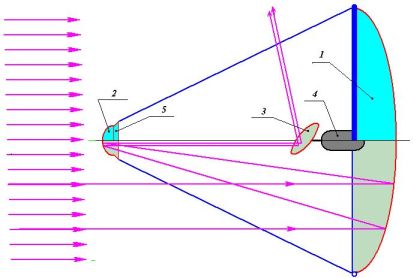
Рис. 1. Схема солнечного
парусника с управляемым вектором тяги.
На рисунке синим цветом
показан «рангоут» парусника, красным – светоотражающие плёнки, 1 – основной
парус, 2 – параболическое зеркало, 3 – управляемое плоское зеркало, 4 –
корпус корабля, 5 – зеркальное кольцо-стабилизатор.
Рангоут корабля посредством
тонких жёстких стержней связан в единую конструкцию с корпусом корабля
4 таким образом, чтобы общий центр массы был расположен в центре плоского
зеркала 3. Работает устройство так:
-
основной парус 1 – плёночное
параболическое зеркало – собирает солнечный свет в фокусе параболического
зеркала 2;
-
зеркало 2 формирует практически
параллельный пучок и направляет его на управляемое плоское зеркало 3;
-
зеркало 3 отражает его под углом,
необходимым для создания нужного направления тяги.
Давление света на зеркала 1
и 2 в сумме практически взаимно компенсируется и «работает» только импульс
зеркала 3. Стабилизацию корабля по отношению к Солнцу обеспечивает зеркальное
коническое кольцо 5, окружающее зеркало 2, центрирующее световой поток
на зеркале 2 путём поворота корабля вокруг центра массы при дисбалансе
падающего на кольцо 5 светового потока. Такое устройство снимает проблему
поворота большого плёночного паруса и обеспечивает максимальное значение
его эффективной площади, независимо от направления вектора тяги. Разумеется,
стабилизация паруса вращением, как это делалось в эксперименте «Знамя-2»,
исключена, так как момент, создаваемый кольцом 5, приведёт в этом случае
к прецессии.