Луноходу– 50 лет
По материалам Б.В. Гладких
«... Мне посчастливилось принять
непосредственное участие в создании Лунохода. В связи с тем, что условия
его эксплуатации: + 150оС и вакуум, пришлось
рассматривать изобретения того времени, когда не было ни резины, ни смазки…
Так что техническое наследие имеет не только историческое и патриотическое,
но и практическое значение. Многие ли в нашей стране знают, что шасси Лунохода
полностью изготовлено в нашем городе, во ВНИИтрансмаш? К сожалению, уже
нет полигона, на котором отрабатывали и демонстрировали работу лунохода
и макеты других планетоходов. Значительная часть экспонатов продана в другие
города и страны»...

«Луноход-1» (8ЕЛ № 203)
– первый в мире планетоход, успешно работавший на поверхности другого небесного
тела.
Проработал на Луне 11 лунных
дней (10,5 земных месяцев – с 17.11.1970 по 14.09.1971 г.), проехал 10
540 м.
Космическая программа
Луноход – планетоход, предназначенный для передвижений по поверхности Луны.
В более узком смысле луноход есть транспортное средство (транспортная платформа),
предназначенное для передвижений по поверхности Луны. Луноход может управляться
как водителем на борту, так и дистанционно, или быть лунным самоходным
роботом. «Луноход» («проект Е-8») – серия советских дистанционно управляемых
самоходных аппаратов-планетоходов для исследования Луны.
«Луноход-0» – автоматический луноход, который должен был стать первым.
На Луну не прибыл вследствие неудачного старта ракеты-носителя с аппаратом
Е-8 № 201 19.02.1969 г. Причина аварии – разрушение обтекателя ракеты-носителя;
«Луноход-1» – первый автоматический луноход, доставленный на Луну и выполнивший
на Луне поставленную задачу. Доставлен на Луну 17 ноября 1970 года советским
лунным кораблём-автоматом «Луна-17» (Е-8 № 203), стартовавшим 10.11.1970
г.;
«Луноход-2» – второй автоматический луноход. Доставлен на поверхность Луны
16 января 1973 года советским лунным кораблём-автоматом «Луна-21» (Е-8
№ 204), стартовавшим 11 января 1973 года;
«Луноход-3» – третий автоматический луноход. Должен был быть доставлен
на поверхность Луны в 1977 году советским лунным кораблём-автоматом «Луна-25»
(запуск не состоялся). Действующий экземпляр находится в музее НПО имени
С. А. Лавочкина.
В рамках реализации советской лунно-посадочной пилотируемой программы Н-1-Л3
в экспедициях предусматривалось использование модификации луноходов, дооборудованных
радиомаяком (для предварительного выбора места посадки) и ручным управлением
(как транспорт для перемещения космонавта).
Создание
«Луноходы» создавались под руководством Г. Н. Бабакина в конструкторском
бюро Машиностроительного завода имени С.А. Лавочкина (Химки). Самоходное
шасси для лунохода с блоком управления движением и системой безопасности
с комплектом информационных датчиков было создано под руководством А.Л.
Кемурджиана во ВНИИтрансмаш (Ленинград), где до этого разрабатывались ходовые
части танков. Эскизный проект лунохода был утверждён осенью 1966 года.
К концу 1967 года была готова вся конструкторская документация. Масса и
габариты создаваемых луноходов были обусловлены максимальной возможной
массой, доставляемой на поверхность Луны унифицированной посадочной ступенью,
и габаритами головного обтекателя ракеты-носителя «Протон», с помощью которой
связка «посадочная ступень – луноход» выводилась на траекторию полёта к
Луне. Модифицированные для пилотируемых экспедиций луноходы должны были
заранее детально обследовать предполагаемый район посадки лунного корабля,
а также исполнять роль радиомаяков для осуществления посадки пилотируемого
корабля в выбранное место. Предполагалось, что перед осуществлением высадки
космонавта на Луну будут отправлены два лунохода для выбора основного и
запасного районов прилунения.
В запасной район впоследствии должна была сесть в автоматическом режиме
резервная беспилотная лунная кабина. В основном районе прилунилась бы лунная
кабина с космонавтом. Основной режим посадки лунной кабины предполагался
автоматическим – на радиомаяк лунохода. Если же при посадке основной лунный
корабль получал повреждения, которые не позволили бы ему стартовать с Луны,
то космонавт должен был воспользоваться одним из луноходов для поездки
к резервной лунной кабине. Космонавт также мог использовать луноход как
транспорт для себя и перемещаемого оборудования. На таком модифицированном
луноходе предполагалось иметь запас кислорода, разъёмы для шлангов лунного
скафандра, место космонавта в виде небольшой площадки с пультом управления
в передней части аппарата.
Конструкция
«Луноход» представляет собой установленный на самоходное шасси герметичный
приборный отсек. Масса машины (по исходному проекту) – 900 кг, диаметр
верхнего основания корпуса – 2150 мм, высота – 1920 мм, длина шасси – 2215
мм, Колея – 1600 мм. Колёсная база – 1700 мм. Диаметр колёс по грунтозацепам
– 510 мм при ширине в 200 мм. Диаметр приборного контейнера – 1800 мм.
Максимальная скорость передвижения по Луне – 4 км/ч.
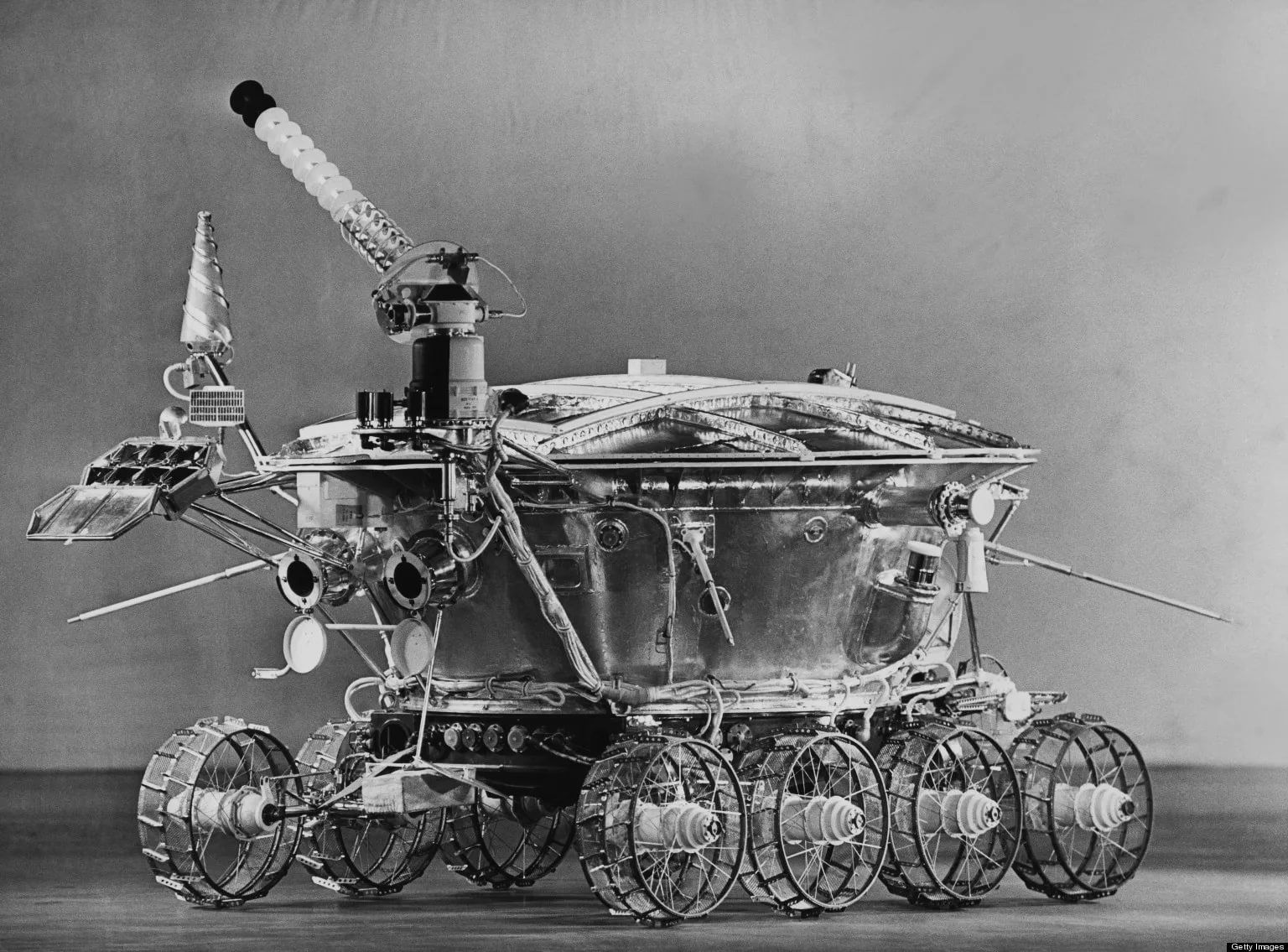 Гермокорпус «Лунохода» является основной частью конструкции и служит платформой
для аппаратуры бортовых систем и её защиты от воздействия внешней среды.
Гермокорпус выполняет также функции платформы для шасси и служит для крепления
на нём элементов ходовой части. Корпус имеет форму перевёрнутого усечённого
конуса с выпуклыми верхним и нижним днищами. С целью уменьшения массы корпус
изготовлен из магниевых сплавов. Верхняя поверхность корпуса используется
как радиатор-охладитель системы терморегуляции, закрываемый на ночь крышкой
с солнечной батареей для сохранения тепла.
Гермокорпус «Лунохода» является основной частью конструкции и служит платформой
для аппаратуры бортовых систем и её защиты от воздействия внешней среды.
Гермокорпус выполняет также функции платформы для шасси и служит для крепления
на нём элементов ходовой части. Корпус имеет форму перевёрнутого усечённого
конуса с выпуклыми верхним и нижним днищами. С целью уменьшения массы корпус
изготовлен из магниевых сплавов. Верхняя поверхность корпуса используется
как радиатор-охладитель системы терморегуляции, закрываемый на ночь крышкой
с солнечной батареей для сохранения тепла.
Корпус «Лунохода» для сохранения тепла покрыт снаружи теплоизолирующим
покрытием толщиной около 20 см. Для обогрева аппаратуры применялся радиоизотопный
источник тепла, содержащий ампулы с 210Po.
Источник был вынесен за пределы корпуса. Использовалась активная двухконтурная
система терморегулирования. Шасси «Лунохода» было предназначено для перемещения
аппарата по поверхности Луны (для смазки узлов вращения в вакууме использовался
сульфид молибдена).
В состав шасси входят следующие агрегаты и подсистемы:
– ходовая
часть, включающая восьмиколёсный движитель и индивидуальную эластичную
подвеску колёс;
– электрическая
трансмиссия с индивидуальным полным приводом колёс;
– тормозная
система;
– блок
автоматики шасси;
– комплект
информационно-измерительной аппаратуры (патрульный дозиметр, рентгеновский
эмиссионный спектрометр, рентгеновский телескоп, грунтомер).
Система электропитания «Лунохода», выполненная по схеме «солнечная батарея
– буферная аккумуляторная батарея», обеспечивает питание всех бортовых
систем постоянным током. На «Луноходе» применены серебряно-кадмиевые аккумуляторные
батареи ёмкостью 200 ампер-часов. Площадь солнечной батареи составляла
3,5 м2 (электрическая
мощность – 180 ватт). Предельное энергопотребление составляло в течение
10 мин – 1 кВт. Номинальное энергопотребление – 250 Вт.
Система управления луноходом состояла из двух телевизионных камер, подключённых
к центральному блоку, содержащему узлы электроники и автоматики. Блок состоял
из двух полукомплектов (по одному для каждой камеры), из которых один работал,
а второй находился в резерве. Телевизионные камеры «Лунохода-1» были выполнены
на видиконах с регулируемой памятью диаметром 13,5 мм. Вес телевизионной
системы составлял 12 кг, потребляемая ею мощность равнялась 25 Вт. В передающей
камере «Лунохода-2» были использованы видиконы диаметром 26 мм, что положительно
повлияло на качество изображения, при том, что габариты и потребляемая
мощность камер увеличились незначительно. Конструкция видиконов обладала
высокой механической прочностью и устойчивостью как на активном участке
траектории полёта, так и в движении.
Антенны: остронаправленная антенна (спиральная); малонаправленная антенна
(конус); штыревые антенны.
Оборудование
Пульт дистанционного управления «Луноходом» (пульт оператора остронаправленной
антенны)
Пульт фиксации хода машины
Две телекамеры (одна резервная), четыре панорамных телефотометра;
Рентгеновский флуоресцентный спектрометр РИФМА;
Рентгеновский телескоп РТ-1;
Одометр-пенетрометр ПрОП;
Детектор радиации РВ-2Н;
Лазерный рефлектор ТЛ.
В «Луноходе-1» оборудование состояло из двух систем, содержащих в сумме
шесть телекамер. Поддержание температуры лунной ночью обеспечивалось радиоизотопным
источником тепла В3-Р70-4 с начальной тепловой мощностью 150 – 170 Вт,
которая выделялась изотопом полоний-210 (в составе полонида иттрия). Общая
начальная масса полония – 1,1 – 1,2 г, период полураспада 138 дней.
Описание
Предназначался для изучения особенностей лунной поверхности, радиоактивного
и рентгеновского космического излучения на Луне, химического состава и
свойств грунта. Масса планетохода составила 756 кг, длина с открытой солнечной
батареей – 4,42 м, ширина – 2,15 м, высота – 1,92 м. Диаметр колёс – 510
мм, ширина – 200 мм, колёсная база – 700 мм, ширина колеи – 1600 мм. Доставлен
на поверхность Луны 17 ноября 1970 года советской межпланетной станцией
«Луна-17» и проработал на её поверхности до 14 сентября 1971 года (в этот
день был проведён последний успешный сеанс связи с аппаратом).
План полёта
На 125-й секунде полёта двигатель первой ступени прекращал работу; производилось
её отделение, запускался двигатель второй ступени. На 200-й секунде полёта,
на высоте 80 км, сбрасывался головной обтекатель. На 375-й секунде полёта
выключались двигатели второй ступени; при этом аппарат имел скорость 4,5
км/с. Производилось разделение ступеней, включался двигатель третьей ступени.
На 588-й секунде полёта происходило отключение двигателя третьей ступени
и отделение головного блока; дальнейший разгон производился двигателями
блока «Д». На 958-й секунде полёта двигатель блока «Д» отключался; аппарат
оказывался на промежуточной орбите вокруг Земли. На 35-й минуте полёта
раскрывались опоры посадочного устройства. На 66-й минуте полёта блок «Д»
ориентировался в пространстве необходимым образом и вновь запускал двигатель
для перелёта к Луне. Через 12 секунд после отключения двигателя блока «Д»
происходило его отделение и раскрытие антенн.
Через 4 суток 7 часов после старта Е-8 с помощью двигательной установки
ступень КТ выводился на окололунную орбиту с высотой 120 км и периодом
обращения 2 часа. Через сутки проводилась первая коррекция высоты перицентра
над выбранной точкой посадки до высоты 20 км, а ещё сутки спустя – вторая
коррекция для исправления плоскости подхода аппарата к точке посадки.
Через 7 суток 16 часов после старта запускалась тормозная двигательная
установка, снижавшая скорость почти до нуля на высоте 2,3 км над поверхностью.
До высоты 700 м происходил спуск с выключенным двигателем; далее до высоты
20 м спуск шёл с работающим двигателем, после чего основная двигательная
установка ступени КТ отключалась и запускались двигатели малой тяги. На
высоте 1-2 метра, определяемой гамма-высотомером «Квант-2», двигатель отключался,
и станция совершала мягкую посадку.
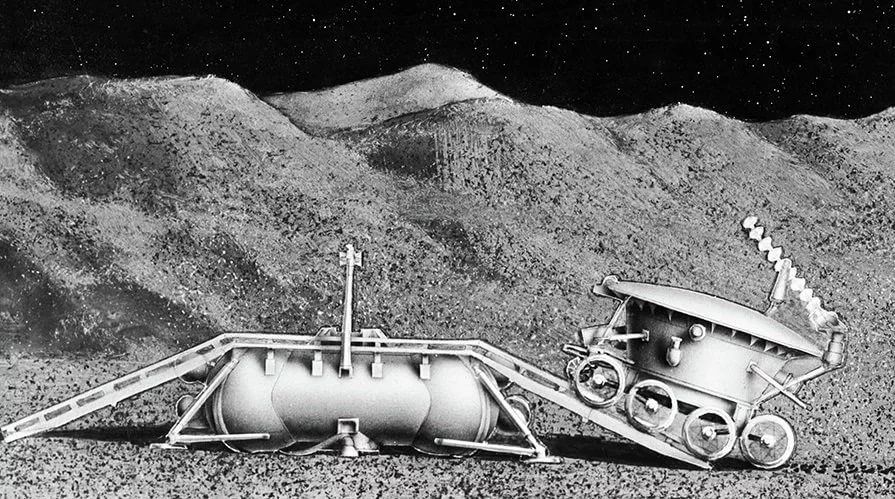 После прилунения изображение места посадки передавалось на Землю, и по
команде операторов раскрывались две пары трапов. Луноход отделялся от КТ
и сходил на лунную поверхность; открывалась его солнечная батарея и начиналась
зарядка аккумуляторов.
После прилунения изображение места посадки передавалось на Землю, и по
команде операторов раскрывались две пары трапов. Луноход отделялся от КТ
и сходил на лунную поверхность; открывалась его солнечная батарея и начиналась
зарядка аккумуляторов.
Управление
«Луноход» мог двигаться с двумя различными скоростями, в двух режимах:
ручном и дозированном. Дозированный режим представлял собой автоматический
этап движения, программируемый оператором. Поворот осуществлялся путём
изменения скорости и направления вращения колёс левого и правого бортов.
Управление «Луноходами» осуществлялось группой операторов из 11 человек,
составлявших сменные «экипажи»: командир, водитель, оператор остронаправленной
антенны, штурман, бортинженер. Центр управления находился в посёлке Школьное
(НИП-10). Каждый сеанс управления длился ежедневно до 9 часов, с перерывами
в середине лунного дня (на 3 часа) и на лунную ночь; экипажи менялись каждые
два часа.
Состав команды:
Командиры – Николай Еременко, Игорь Фёдоров;
водители – Габдулхай (Геннадий) Латыпов, Вячеслав Довгань;
штурманы – Константин Давидовский, Викентий Самаль;
бортинженеры – Леонид Мосензов, Альберт Кожевников;
операторы остронаправленной антенны – Валерий Сапранов, Николай Козлитин;
резервный водитель и оператор – Василий Чубукин.
Отработка действий операторов проводилась на действующей модели «Лунохода»
на Лунодроме, на котором имитировались лунные реголит и рельеф. Дистанционное
управление осуществлялось при помощи комплекса аппаратуры контроля и обработки
телеметрической информации на базе ЭВМ «Минск-22» – СТИ-90. Основную сложность
при управлении луноходом создавало запаздывание радиосигнала, – радиосигнал
с Земли до Луны и обратно проходит около 2 секунд, а передача одного кадра
занимала от 3 до 20 секунд, в зависимости от рельефа.
Запуск и эксплуатация
Автоматическая межпланетная станция «Луна-17» с «Луноходом-1» стартовала
10 ноября 1970 года и 15 ноября вышла на орбиту искусственного спутника
Луны. 17 ноября 1970 года станция благополучно прилунилась в Море Дождей,
и «Луноход-1» съехал на лунный грунт. В течение первых трёх месяцев запланированной
работы помимо изучения поверхности аппарат выполнял ещё и прикладную программу,
в ходе которой отрабатывал поиск района посадки лунной кабины. После выполнения
программы луноход проработал на Луне в три раза больше своего первоначально
рассчитанного ресурса (3 месяца).
За время нахождения на поверхности Луны «Луноход-1» проехал 10 540 м, обследовав
площадь в 80 000 м2,
передал на Землю 211 лунных панорам и 25 тысяч фотографий. Максимальная
скорость движения составила 2 км/ч. Суммарная длительность активного существования
Лунохода составила 301 сутки 06 ч 37 мин. За 157 сеансов с Землёй было
выдано 24 820 радиокоманд. Прибор оценки проходимости отработал 537 циклов
определения физико-механических свойств поверхностного слоя лунного грунта,
в 25 точках проведён его химический анализ. 8 марта 1971 года операторы
«Лунохода-1» дважды «нарисовали» на Луне колёсами цифру «8»
15 сентября 1971 года температура внутри герметичного контейнера лунохода
стала падать, так как исчерпался ресурс изотопного источника тепла. 30
сентября аппарат на связь не вышел, и 4 октября все попытки войти с ним
в контакт были прекращены. На «Луноходе-1» был установлен уголковый отражатель,
с помощью которого ставились эксперименты по точному определению расстояния
до Луны. Отражатель «Лунохода-1» в первые полтора года работы обеспечил
порядка 20 наблюдений (первое – 5 декабря 1970 г.). В марте 2010 года «Луноход-1»
был найден исследователями на снимках зонда LRO. 22 апреля 2010 года группа
американских учёных из университета Калифорнии в Сан-Диего под руководством
Тома Мерфи сообщили, что смогли впервые с 1971 года получить отражение
лазерного луча от отражателя «Лунохода-1».
Положение «Лунохода-1»
на поверхности Луны: 38°18'55'' с. ш. 35°00'29'' з. д.G.
Борис
Васильевич Гладких
Действительный государственный советник СПб II кл., заслуженный изобретатель
РФ, ктн, исполнительный директор СПбОО «Общественный совет по инженерному
жизнеобеспечению Санкт-Петербурга» принимал участие в разработке новой
транспортной техники, является одним из разработчиков «Лунохода», космических
станций «Венера». Награжден Дипломом и медалью Федерации Космонавтики СССР,
действительный член Федерации Космонавтики России. Мастер спорта по альпинизму,
инструктор, член Союза спасателей России.
 Биография
Биография
Борис Васильевич Гладких родился 30 июля 1939 года в Новгороде. После окончания
Ленинградского политехнического института (1962) был направлен во ВНИИтрансмаш
и проработал в нём более 30 лет, пройдя путь от инженера до начальника
научно-технического отдела, защитил диссертацию, и ему присуждена учёная
степень кандидата технических наук. Автор более 60 научных трудов и 14
изобретений. Участвовал в создании самоходного шасси «Лунохода-1», «Лунохода-2»,
а также в подготовке исследований на космических станциях «Венера-13» и
«Венера-14».
Председатель комиссии по промышленности Ленинградского городского Совета
народных депутатов (1992-1993), Председатель комиссии по промышленной политике
Законодательного Собрания Санкт-Петербурга (1994-1998). В 1997 г. Б. В.
Гладких окончил Северо-западную академию государственной службы по специальности
«Государственное и муниципальное управление». С 1998 г. Заместитель руководителя
территориального органа по СПб и Ленобласти Минфедерации России.
Общественная работа: с 1971 – председатель секции альпинизма ВНИИ Трансмаш,
глава секции альпинизма ЛОС ДСО «Зенит»; спасатель-общественник Ассоциации
спасательных формирований РФ (Российский корпус спасателей), удостоверение
личности № 0590. КМС – 1974, МС – 1979. Является членом Союза альпинистов
РФ, Ассоциации гидов (удостоверение № 59). Жетон «Спасотряд» – 1969, 14
спасработ. Инструктор: 2 категории (1979); проработал 17 сезонов, в т.ч.
в качестве тренера-спасателя МАЛ-а «Памир» 10 сезонов.
 Совершил 107 восхождений (первое восхождение – 1965, последнее на пик Коммунизма
– 1991): 5-й к/тр. – 43, 6-ой – 1; первопрохождений – 5. Первенство СССР
– 3: 1975 – 9 место, Даллар по северной стене, 5б+1, пп: Шопин В.Г. + 5;
1979 – Энгельса (Ю) по В ст., 5б, пп: Шопин В.Г.+ 7 (Гладких, Крюков, Суржик,
Оше, Поляков, Космачев, Лихачев); 1980 – участие (рук. Шопин) закончилось
срывом одного участника на 1-ой веревке (срыв без серьёзных последствий
из-за поломки самодельного зажима). 7-тысячники – 15: 8.1971 – п. Коммунизма
(в двойке с Карасёвым во время спасательных работ команды ЦС ДСО «Труд»;
в МАЛ-е «Памир» (период с 1981 по 1991 г.): 8.08.81, 5.08.82, 2.08.85,
2.08.91 – пик Коммунизма (по ребру Буревестника); 3.08.83 – пик Коммунизма
(по Бородкину); 7.07.84 – пик Ленина (через скалы Липкина); 15.07.81, 24.07.82,
26.07.83, 15.08.84, 12.07.85, 29.07.87, 17.07.88, 28.07.88 – пик Корженевской
(по Цейтлину).
Совершил 107 восхождений (первое восхождение – 1965, последнее на пик Коммунизма
– 1991): 5-й к/тр. – 43, 6-ой – 1; первопрохождений – 5. Первенство СССР
– 3: 1975 – 9 место, Даллар по северной стене, 5б+1, пп: Шопин В.Г. + 5;
1979 – Энгельса (Ю) по В ст., 5б, пп: Шопин В.Г.+ 7 (Гладких, Крюков, Суржик,
Оше, Поляков, Космачев, Лихачев); 1980 – участие (рук. Шопин) закончилось
срывом одного участника на 1-ой веревке (срыв без серьёзных последствий
из-за поломки самодельного зажима). 7-тысячники – 15: 8.1971 – п. Коммунизма
(в двойке с Карасёвым во время спасательных работ команды ЦС ДСО «Труд»;
в МАЛ-е «Памир» (период с 1981 по 1991 г.): 8.08.81, 5.08.82, 2.08.85,
2.08.91 – пик Коммунизма (по ребру Буревестника); 3.08.83 – пик Коммунизма
(по Бородкину); 7.07.84 – пик Ленина (через скалы Липкина); 15.07.81, 24.07.82,
26.07.83, 15.08.84, 12.07.85, 29.07.87, 17.07.88, 28.07.88 – пик Корженевской
(по Цейтлину).
 В
оглавление
В
оглавление