Космический эксперимент
«Контур-3»
О работах по российско-германской космической программе «Контур» журнал
уже сообщал ранее. В этом номере речь пойдёт о дальнейших планах работы
по этой программе. Вот что по этому поводу говорит её Научный руководитель,
директор ИКНТ, зам. главного конструктора ЦНИИ РТК проф. В.С. Заборовский:
«Роботам
в эксперименте «Контур-3» космонавты должны будут давать задание на уровне
описания целей. А как эту цель достигнуть, как «рассчитать» оптимальную
траекторию движения – робот и его виртуальный аватар должны будут решать
сами, Проводимый эксперимент носит название «Контур». Всего таких экспериментов
уже было два: «Контур-1» (2009-2011) и «Контур-2» (2011-2015). Получены
уникальные результаты, как в области робототехники, так и компьютерных
наук, а некоторые операции с такой точностью и ловкостью проведены впервые
в мире».

Пункт управления роботами
на МКС
… «Хорошо известно, что в современной наукометрике есть 9 уровней для
оценки готовности технологий. На самом верху, на 9-ом уровне, находятся
технологии, готовые к демонстрации, а в окончательном виде – при «лётных»
испытаниях. Поэтому я бы упомянул о завершённом в конце 2015-го года космическом
эксперименте в области робототехники, который проводился на борту российского
сегмента международной космической станции (МКС). Этот космический эксперимент
непосредственно связан с робототехникой, как отраслью знаний и технологий,
которые в ближайшей перспективе могут существенно изменить облик экосистемы
Земли и других планет. Эксперимент был связан с фантастической задачей,
а именно отработкой технологий проведения с помощью роботов операций, которые
потребуются при создании на поверхности этих планет различных объектов,
в том числе, и обитаемых баз. Однако, полученные результаты и апробированные
технологические решения носят «сетецентрический» характер, поэтому их можно
легко масштабировать для различных применений...
Но отработанные решения – это только малая часть задач, которые надо решить
при колонизации других планет. Понятно, что простые транспортные операции
были отработаны давно. Были советские луноходы, американцы ездили по поверхности
Луны на автомобилях. Но, если мы хотим создать промышленную инфраструктуру
на поверхности планеты (в данном случае Луны), то список операций должен
быть существенно расширен. Не ясно, кто и как будет выполнять сложные механические,
транспортные, логистические операции при создании Лунной базы. Человек
в скафандре? Это неудобно, очень дорого и, вообще, вряд ли человек сможет
сделать что-то толковое, когда будет работать в таких экстремальных условиях.
Мы считаем, всё это должны делать роботы, но под пристальным контролем
человека.
Естественно, возникает вопрос, какой технологией воспользоваться, чтобы
контролировать робота, но при этом давать ему возможность автономно функционировать
в рамках некоторого сценария. Нами отработана следующая идея: с борта орбитальной
станции космонавты, которые, кстати, в случае эксперимента на МКС летят
относительно поверхности Земли со скоростью 8 километров в секунду, по
каналам компьютерной сети (условно, космическому Интернету) связаны с роботами,
которые выполняют заданные операции. При этом космонавт с борта орбитальной
станции может наблюдать и контролировать результаты и задавать роботу новые
задания. Проводимый эксперимент носит название «Контур». Всего таких экспериментов
было два («Контур-1» 2009-2011 гг, «Контур-2» 2011-2015 гг.).
Сейчас планируем новый эксперимент «Контур-3». Получены уникальные результаты,
как в области робототехники, так и компьютерных наук, а некоторые операции
с такой точностью и ловкостью проведены впервые в мире. Принципиальная
разница в следующем: если вы полностью контролируете все операции роботов,
это телеуправление и отвечает за результат человек-оператор. Но если вы
даете роботу задание, а он уже на основе своей сенсорной информации и «модели
мира» выполняет эту операцию и докладывает вам, что, например, электрический
кабель состыкован, аварийная лампочка погашена, то это уже «искусственный
интеллект».
Если, например, роботу не подойти к выключателю, то он «вычисляет» траекторию
движения с учётом информации о препятствии, а если ресурсов не хватает,
то может отказаться выполнять команду или потребовать в помощь ещё одного
робота. У роботов, которые работают в сетевой среде, появляется как бы
дополнительная степень свободы, они могут обратиться за помощью к
другому роботу, смоделировать ситуацию с использованием подключённого к
сети суперкомпьютера или послать запрос к человеку-оператору, чтобы он
«взял управление на себя».
Наделяя роботов возможностями «вычислять» решения, взаимодействуя с
оператором или суперкомпьютером, разработчики открывают новую страницу
в развитии робототехники. Роботы, как киберфизические системы, уже не являются
набором отдельных мехатронных устройств, а робототехника XXI века – это
сетецентрическая технология «интерент-вещей», в рамках которой все объекты
связаны между собой информационными потоками, имеют общую модель мира и
согласованные интерфейсы взаимодействия.
Тренировки с участием космонавтов (Г. Падалки и С. Волкова) уже были проведены
в рамках испытаний комплекса научной аппаратуры «Контур-2», разработанной
для дистанционного управления с борта МКС роботами, находящимися на поверхности
Земли (или какой-либо другой планеты). Суть эксперимента состояла в том,
чтобы космонавты смогли управлять роботами, которые будут находиться в
стенах лаборатории ЦНИИ РТК на Земле, с орбиты. Один из участвующих в эксперименте
роботов – способный причудливо изогнуться в любом направлении гиперманипулятор
КИМ (кинематический избыточный манипулятор), второй – андроид.
Идея заменить человека роботом в создании базы на Луне вполне понятна.
Ведь человек сможет проработать на Луне не более трёх часов, после
чего будет вынужден покинуть «строительную площадку». Роботы же лучше защищены
от радиации, перепадов температур и прочих факторов, мешающих работе на
поверхности Луны человеку. Всё это поможет роботам проработать несколько
месяцев, необходимых для создания лунной базы.
Когда начнётся само строительство базы на Луне, пока не известно.
Практически завершена разработка проекта «Контур-2», первые роботы уже
протестированы. Теперь космонавтам не придётся строить лунные станции или
выполнять другие работы, всё это сделают роботы. Следующим шагом запланировано
создание роботов, способных выполнять любые работы на других планетах.
Для этой задачи разрабатывают роботов серии «Контур-3». Это будут сверхмощные
андроиды, способные к сложным анализам и вычислениям. Самое же необыкновенное
в этом эксперименте то, что управление ими можно производить с Земли.
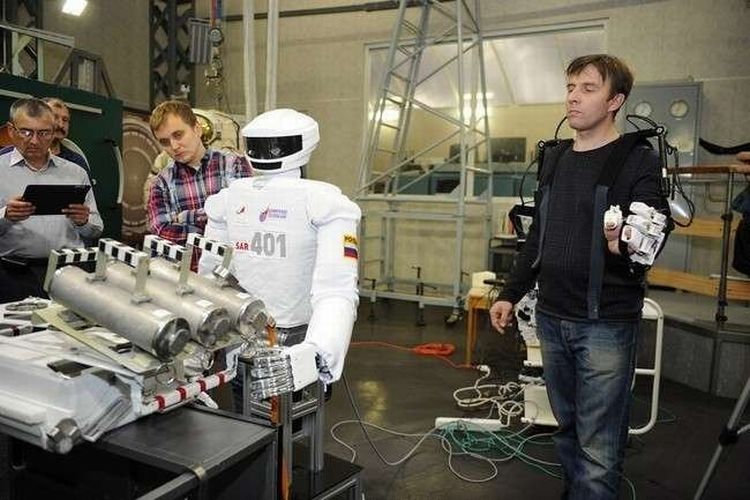
«Учёба» андроида в ЦНИИ
РТК

«Железное» знакомство
Подробная информация о возможностях роботов не освещается, но есть предположение,
что они смогут управлять космическим кораблём, строить напланетные станции,
а также проводить несложные операции по спасению космонавтов.
 В
оглавление
В
оглавление