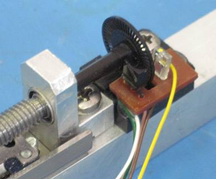
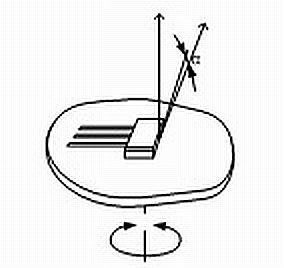
Рис. 1. Считывающий блок инкрементального углового датчика на двух оптопарах [1].
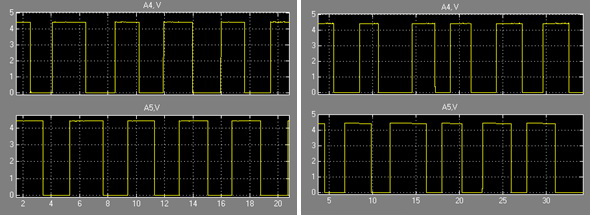
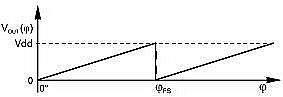
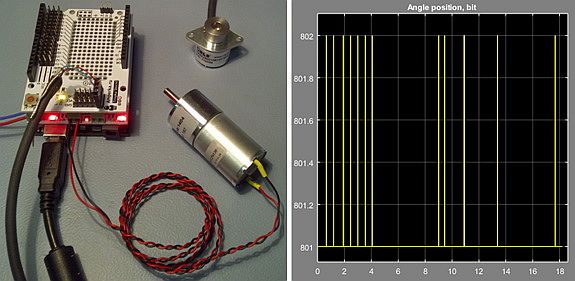
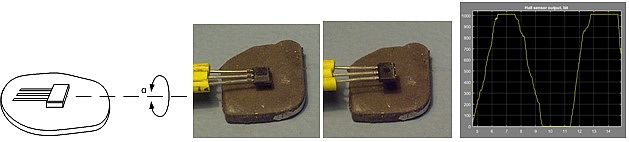
Рис. 2. Выходные сигналы инкрементального датчика при движении объекта в прямом (левый рисунок) и обратном (правый рисунок) направлениях.


|
|
|
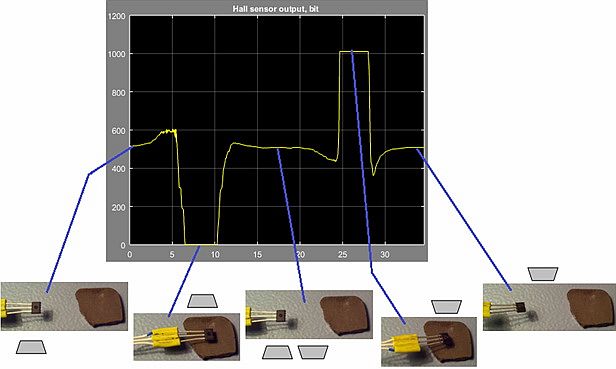
| < 2 мм | Насыщение, 0 .. 5 В |
| 2 мм |
|
|
|
|
|
|
|
| Параметр | Инкрементальный датчик с подсчётом прерываний | Инкрементальный датчик с аппаратным счётчиком | Датчик с линейным выходом |
| Скорость | Минимальная (подсчёт инкрементов) | Максимальная (подсчёт инкрементов) | Максимальная (подсчёт периодов) |
| Разрешение | Максимальное (инкремент) | Максимальное (инкремент) | Максимальное (инкремент) |
| Разрядность | Не ограничена | Ограничена (16, 32 бит) | Не ограничена |
| Зависимость измерения положения от шума в выходном канале датчика | Минимальная | Минимальная | Максимальная |
| Используемые
вычислительные ресурсы |
Максимальные (обработка
прерываний, чтение портов, выделение, и суммирование импульсов) |
Минимальные (передача данных контроллеру) | Минимальные (чтение АЦП и подсчет периодов) |
| Стоимость | Минимальная (стоимость датчика) | Максимальная (стоимость и счётчика) | Минимальная (стоимость датчика) |