В.С. Заборовский,
М.Ю. Гук, В.А. Мулюха
Киберфизический
подход в сетецентрическом управлении
Аннотация. Предлагамое вниманию читателя сообщение представляет собой
вариант нашей статьи «Применения киберфизического подхода в задачах сетецентрического
управления роботами» [1]. В статье анализируются особенности применения
кибернетических методов к управлению распределёнными физическими объектами,
отдельные части которых взаимодействуют между собой путём передачи информации
через компьютерные сети. В рамках рассматриваемого киберфизического подхода
предложена структура интерактивной системы управления с борта МКС напланетным
роботом, которая реализует алгоритм сило-моментного очувствления задержек
при передаче данных через сеть компьютерных телекоммуникаций.
1. Введение. В недалёкой перспективе возможно создание искусственных
физических устройств, обладающих гибкостью, эластичностью и чувствительностью,
характерной для живых организмов, но большей силой и прочностью используемых
элементов. Такие устройства будут способны воспринимать, хранить и передавать
информацию об окружающей их внешней среде, которая будет использоваться
в процессе функционирования. Носителями такой информации могут быть различные
физические сигналы, с помощью которых кодируются и воспринимаются встроенными
вычислителями понятия и данные, используемые в рамках выбранной схемы концептуализации
реальности.
Передача информации осуществляется как между различными физическими объектами,
так и между объектами и человеком-оператором. Среди объектов будут исполнительные
и интеллектуальные объекты, обладающие базами данных и знаний, которые
нужны для достижения целей функционирования.
Поиск необходимой информации для реализации выбранной стратегии является
важным этапом функционирования коллектива роботов. Применение теории равновесных
случайных процессов позволяет описать обмен информацией между роботами
по аналогии с правилами биржевой торговли.
Такие модели применяются для:
оптимального выбора структуры каналов связи, обеспечивающих минимальный
расход энергии на получение максимально полезной информации;
концентрацию усилий всех роботов на достижение цели, поставленной оператором;
ориентацию действий коллектива роботов на получения полезной информации
с минимальным риском.
Сложные инженерные задачи управления группировками подвижных роботов мало
изучены. Для их формализации всё чаще используется киберфизический (КФ)
подход, который расширяет спектр инженерно-физической методов проектирования
сложных технических объектов, за счёт рассмотрения информационных аспектов
связи и взаимодействия объектов управления между собой и с внешней средой.
Другими словами, связь между объектами имеет форму информационных потоков
данных. Поэтому выделение КФ систем в особый класс объектов управления
обусловлено необходимостью интеграции различных компонент, отвечающих за
вычисления, коммуникации, хранение данных и управление («3C» – computation,
communication, control).
Хотя в современной науке существуют различные подходы к использованию информационных
аспектов функционирования физических объектов, но только в рамках кибернетики
такие подходы нашли конструктивные инженерные применения. Концептуальное
различие между замкнутыми и открытыми системами с точки зрения информационно-вычислительных
аспектов их функционирования требует использования новых моделей описания
реальности, в которых учитываются характеристики информационных процессов,
порождаемых при функционировании физических объектов, доступных для наблюдения,
обработки и передачи через компьютерные сети связи.
Поэтому метафору КФ управления можно сформулировать как «the reisnothingoutsidethebit»,
а в процессе порождения цифровой информации выделить фазы «наблюдение»,
«ориентация», «принятие решения» и «реализация действий».
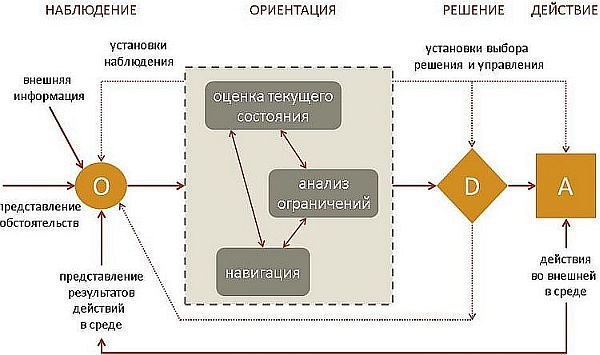
Рис . 1. КФ модель системы
управления
КФ модель системы управления может быть представлена (рис. 1) как совокупность
компонент, включающая блоки: получения информации о характеристиках внешней
среды (observation), анализа параметров текущего состояния объекта управления
(orientation), принятия решений в соответствии с формализованной целью
функционирования (decision), организации и реализации действий, обеспечивающих
достижение выявленной цели (action). Организация взаимодействие этих блоков
с помощью каналов информационного обмена позволяет рассматривать образовавшуюся
сетевую структуру как универсальную платформу, с помощью которой для достижения
выявленных целей функционирования могут использоваться различные подходы,
включая применение алгоритмов с обратной связью или механизмов реконфигурации
структуры объекта для уменьшение энтропии целевых условий вследствии неопределённости
параметров модели внешней среды или внутренних процессов диссипации.
Сетецентрические решения позволяют использовать универсальные средства
организации информационного обмена для объединения различных технологий,
относящихся как к наблюдаемым, так и наблюдающим компонентам управляемой
системы, характерными отличиями которых являются свойства «часть – целое»
и отношение «система – внешняя среда». Параметры и структура такой системы
управления могут оперативно корректироваться в соответствии с текущей информацией
о внутренних состояниях объекта и характеристиках внешней среды, которая
поступает в форме цифровых данных.
В результате метафорическое понятие «информационный пепел реальности» ясно
характеризует сущность сетецентрической парадигмы управления, в рамках
которой сочетаются описательный и предписательный аспекты физической и
кибернетической (виртуальной) реальности.
Отмеченные особенности открывают новые перспективы создания интеллектуальных
киберфизических систем, которые уже в ближайшем будущем станут неотъемлемой
частью среды обитания человека в информационном пространстве «интернет
вещей». Согласно оценкам, оснащение сетецентрическими киберобъектами глобального
информационного пространства сети Интернет кардинальным образом изменит
социальную и производственную составляющие жизни людей, что будет способствовать
ускорению процессов формирования экономики знаний и интеллектуализации
всех аспектов деятельности человека.
Однако, этот процесс требует не только инновационных инженерных идей, но
и разработки целостных научных концепций, объединённых универсальной научной
парадигмой. В рамках такой парадигмы информация должна рассматриваться
как фундаментальная концепция объективной реальности, в рамках которой
физическая реальность является в своей основе «цифровой» и, следовательно,
вычислимой.
Идея объединения физических концепций с теорией вычислений привела к формулировке
новой концептуальной схемы описания природы, известной как «itfrombit».
В данной схеме все физические объекты, процессы и явления природы, которые
доступны для восприятия и понимания человеком, в своей основе являются
информационными и поэтому изоморфны некоторым цифровым вычислительным устройствам.
В рамках этой парадигмы информация выступает как объективный атрибут материи,
который характеризует принципиальную различимость потенциально возможных
состояний того или иного объекта реальности. При этом факт различимости,
согласно теории Ландауэра, является чисто энергетическим фактором рассматриваемых
состояний, поэтому даёт объяснения того, что это за состояния и как они
воспринимаются другими объектами.
Это различие проявляется при создании систем, способных путем самовоспроизводства
некоторых своих характеристик, обеспечивать автономность существования
при взаимодействии с внешней средой, в том числе реализовать функцию автореферентности,
как особой формы системной устойчивости, которая достигается с помощью
организации динамически неравновесных процессов обмена информацией с окружающей
средой.
Следует отметить, что на пути к широкому использованию «цифровой реальности»
в задачах управления лежат ограничения, отражающие требования существования
у физических объектов состояний, способных отражать изменения, являющиеся
результатом процессов обмена информацией. Примером такого «отражения» могут
служить силы, величина и направление которых зависит от скорости и объёма
данных, переданных в систему из внешней среды.
Поэтому киберфизический подход в настоящее время чаще всего используется
для описания свойств в так называемых негамильтоновых систем, в которых
процессы самоорганизации описываются диссипативной эволюцией матрицы плотности
состояний. Однако методология киберфизического подхода может успешно применяться
и при создании сложных робототехнических систем, компоненты которых способны
к адаптивной реконфигурации в результате обработки и передачи цифровых
данных или метаданных.
Рассматриваемые в статье задачи управления охватывают актуальную сферу
применения киберфизического подхода, который составляет основу технологии
облачных вычислений и развития методологии кибернетики в направлении управления
метаданными.
2. Киберфизика систем управления. Современные технические системы
имеют чёткие границы, отделяющие их от окружающей среды или других объектов
и систем. Поэтому описание процессов в таких системах носит локальный характер,
а изменения их состояний могут быть описаны с помощью законов физики, которые
в наиболее общем виде имеют детерминированную форму законов сохранения,
например, энергии, массы, импульса и пр.
Математическая формализация этих законов позволяет с помощью вычислений
определять параметры движения физических систем, располагая данными о начальных
состояниях, приложенных силах и свойствах внешней среды. Хотя классическая
методология современной физики, основанная на абстракции «замкнутая система»,
в настоящее время существенно модифицирована за счёт изучения механизмов
диссипации в так называемых «открытых системах», однако такой системный
аспект реальности как информация по-прежнему не используется для построения
моделей управления и описания свойств сложных физических объектов.
В мире современной реальности, когда влияние сети Интернет, суперкомпьютеров
и глобальных навигационных систем на все аспекты деятельности человека
становится доминирующим, учёт воздействия информации на физические объекты
при анализе, например, задач обеспечения устойчивости в малом за счёт процессов
информационного обмена, нельзя не учитывать. Внедрение методов киберфизики
становится особенно актуальным при изучении свойств систем, известных как
«интернет вещей», в которых роботы, сетевые киберобъекты и люди взаимодействуют
между собой, обмениваясь данными в едином информационном пространстве,
для характеризации которого используются такие понятия как «целостность»,
«структура», «целенаправленное поведение», «обратная связь», «равновесие»,
«адаптивность» и др.

Рис. 2. «Большие Данные»
Научные основы управления такими системами обобщенно стали назвать DataScience,
а термином «Большие Данные» – описывать процессы интеграции технологий
цифровой обработки информации, получаемой из внешней физической или виртуальной
среды, которые используются для извлечения полезной для целей управления
информации или метаданных. Однако, реализации потенциала DataScience в
области робототехники требует создания новых методов использования информации
для организации процессов управления, основанных на доставке данных в реальном
масштабе времени в точку локализации движения объектов (концепция datainmotion).
В целом, «большие данные» характеризуются сочетанием трёх или четырёх составляющих
(четырёх «V»): объёма (volume), многообразия
(variety), скорости (velocity) и ценности (value). Дополнительная «V» (visibility)
– видимость («находимость») данных тоже может быть ключевой определяющей
характеристикой. В результате «Большие данные» (рис. 2) в современной науке
становятся синонимом системной сложности задач управления, объединяя такие
факторы физических процессов, которые характеризуют объём, скорость и вариативность
порождаемых ими данных.
3. Управление роботом с борта МКС. Рассмотрим
применение описанных выше принципов кибернетических методов для управления
физическими объектами на примере напланетного робота, движения которого
задаются и контролируются с борта орбитальной космической станции (рис.
3)
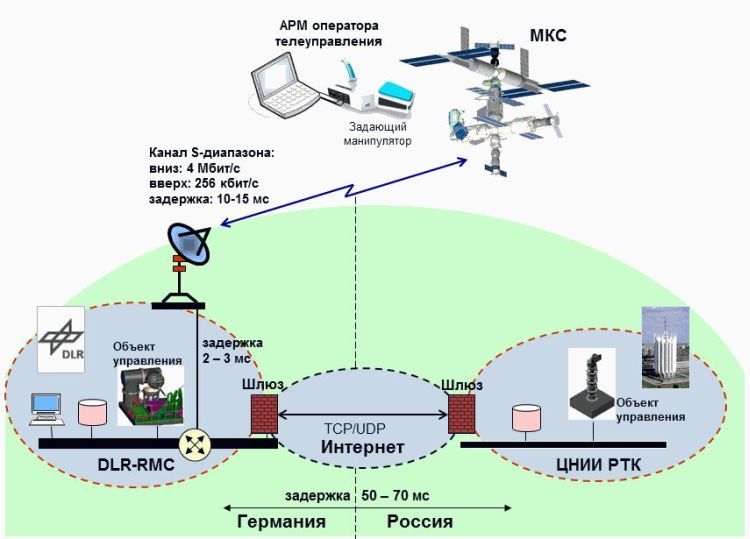
Рисунок 3. Схема космического
эксперимента
Особенностью космического эксперимента (КЭ), которая позволяет отнести
его к классу киберфизческих экспериментов, является то, что для его проведения
используется технология телеприсутствия оператора в условиях, моделирующих
перемещение робота, когда параметры внешней среды (задержки в каналах связи
и препятствия на поверхности планеты) могут спорадическим образом меняться.
Разработанная система управления позволяет в реальном масштабе времени
очувствлять результаты выполнения целевых операций, анализируя данные о
значениях текущих координат перемещения или моментах в шарнирах манипулятора,
которые передаются по каналам компьютерной связи в узел управления (задающий
манипулятор (ЗМ) – силомоментный джойстик) с частотой 500 пакетов в секунду.
Использование эффекта сило-моментного очувствления задержек, возникающих
в каналах связи, позволяет оператору корректировать скорость и направление
перемещения робота и – с помощью воздействия на рукоятку джойстика – ощущать
влияние сетевой среды и формировать оперативную оценку состояния внешней
среды, в которой функционирует напланетный робот. В рассматриваемой системе
управления процессы информационного взаимодействия ЗМ и робота могут быть
декомпозированы на два процесса: локальной отработки команд управления
в режиме жёсткого реального времени и процессы доставки команд управления
через сетевую инфраструктуру с использованием стека протоколов TCP/IP.
Организованная таким образом система обеспечивает взаимодействие двух контуров
управления, которые в обобщённом виде представлены на рисунке 4:

Рис. 4. Взаимодействие двух
контуров управления
Физическая структура потоков данных в такой системе управления представлена
на рис. 5 и состоит из:
локального контура, в котором программный модуль «контроллер ЗМ» (КЗМ)
обеспечивает циклический опрос текущих координат ЗМ, вычисление и отправку
в ЗМ вектора силы, зависящего от текущего положения и скорости перемещения
рукоятки, а также информации обратной связи (T/),
получаемой от объекта управления (ОУ);
сетевого контура, в котором программные компоненты используются для организации
процесса передачи векторов управления (C) и данных телеметрии (T) между
КЗМ и ОУ.
Основой сетевого контура управления является программный модуль Транспортёр,
состоящий из сетевых модулей задающего манипулятора и ОУ (СМЗМ и СМОУ,
соответственно, см. рис. 5), связанных виртуальным транспортным каналом,
который построен на базе протокола UDP. С конечными системами (КЗМ и ОУ)
сетевые модули связаны через модули адаптации (МА) к свойствам среды передачи
(МАЗМ и МАОУ, соответственно).
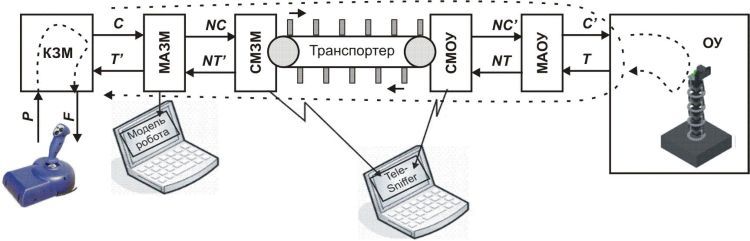
Рис. 5. Физическая структура
потоков данных
Программный модуль Транспортёр использует доставку данных с помощью протокола
UDP, обеспечивая изохронность связи локальных контроллеров – отсчёты вектора
управления, равномерно получаемые от локального контроллера ЗМ, должны
также равномерно (но, естественно, с задержкой) передаваться локальному
контроллеру ОУ. Аналогично во встречном направлении передаются отсчёты
вектора данных, полученных от системы телеметрии робота. Таким образом,
«цифровая» реальность физических процессов актуализируется с частотой дискретизации,
равной частоте отправки сообщений. Учитывая, что задержка доставки данных,
вносимая цифровыми каналами связи, не является постоянной (часть отсчётов
может теряться, порядок доставки может нарушаться), модуль адаптации обеспечивает
восстановление пропущенных отсчётов, используя автоматную модель процессов
передачи данных, адекватность которой верифицируется с помощью вероятностной
модели доставки пакетов.
Модуль «Транспортёр» обеспечивает и доставку асинхронных сообщений о событиях,
которые имеют отношение к процессу телеуправления. Примером таких событий
является нажатие кнопок, имеющихся на рукоятке ЗМ. Эти кнопки могут использоваться
для управления режимом работы ОУ или выполнения ими каких-либо действий.
Асинхронность события означает, что оно возникает эпизодически в произвольный
момент времени. Однако оно должно гарантировано дойти до получателя, сохраняя
привязку по времени к передаваемому изохронному потоку отсчётов.
Вычислительные ресурсы модуля адаптации позволяют реализовать методы предсказательного
моделирования и в случае недостаточности данных спрогнозировать поведение
объекта управления или оператора, не допуская задержек в передаче управляющих
сигналов, и, тем самым, обеспечить плавность управления роботом. Схема
контура управления представлена на рисунке 6.
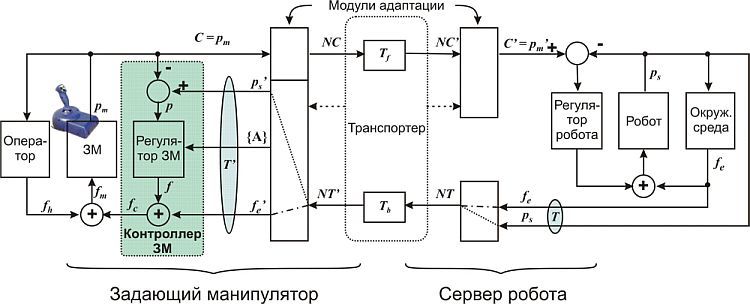
Рис. 6. Схема контура управления
На данной схеме можно видеть разделение контура на три основные части:
контур управляющего устройства
(на схеме слева), выходом которого
является вектор управления c, отображающий текущее положение рукоятки манипулятора
pm. Перемещение рукоятки
определяется силой f, складывающейся из силы воздействия оператора fh,
силы f, формируемой регулятором ЗМ, и силы f'e,
отображающей силу воздействия окружающей среды fe
на робота. Входом p регулятора ЗМ является рассогласование текущей позиции
ЗМ (pm) с отображением текущей позиции робота (ps).
Параметры регулятора – вектор {A} – могут изменяться динамически;
средства коммуникации
(Транспортёр), вносящие задержки доставки,
и модули адаптации, парирующие действие этих задержек. В общем случае задержки
в прямом (Tf) и обратном
канале (Tb) могут
быть различными;
контур управляемого устройства (на схеме справа), вырабатывающего
воздействие на робота по рассогласованию его текущей позиции ps
и отображения p'm
позиции задающего манипулятора. На робота также может воздействовать окружающая
среда с силой fe.
В качестве обратной связи может использоваться вектор текущей позиции робота
ps и, при наличии
соответствующих датчиков, вектор силы воздействия окружающей среды fe.
Организация процесса удалённого управления с силомоментным очувствлением
требует того, чтобы в процессе управления оператор имел возможность «ощущать»
текущее состояние как робота, так и сети передачи данных. Поэтому для описания
конфигурационного пространства системы управления предлагается использовать
модель виртуальной пружины, закрепленной одним концом в основание джойстика,
начальное положение которой совпадает с текущим положением управляемого
робота. В начальном положении робот никаким образом не воздействует на
ЗМ. Однако если оператор начнет осуществлять управление и выводить джойстик
из начального положения, то чем дальше будет отведён джойстик от начального
положения, тем большие усилия операция растяжения виртуальной пружины потребует
от оператора.
В процессе управления стартовое положение виртуальной пружины будет изменяться
так, чтобы совпасть с текущим положением координат робота. Эти изменения
оператор сможет ощутить в виде ослабевания силового давления виртуальной
пружины и, как следствие, более лёгкого продвижения ЗМ в заданном направлении.
Предложенная модель позволяет организовать процесс управления так, чтобы
информация о состоянии канала связи вносила коррективы в процесс очувствления.
Другими словами, жёсткость виртуальной пружины должна увеличиваться не
только в зависимости от расхождения положения робота и ЗМ, но и корректироваться
с учётом величины задержки данных в канале связи, увеличивая, таким образом,
инерционность сетевого контура управления.
Для реализации такого режима взаимодействия на управляющем устройстве потребуется
обрабатывать дополнительный объём информации о состоянии канала связи,
в качестве которой в ЗМ используются упорядоченная по времени последовательность
отсчётов параметра задержки RTT и доля потерянных сетевых пакетов (ДПП).
Таким образом, жёсткость виртуальной пружины и скорость перемещения исполнительного
органа робота будут изменяться пропорционально усреднённым значениям RTT
и ДПП.
В результате при увеличении задержек величина силового воздействия на рукоятку
ЗМ не позволит оператору осуществлять быстрое изменение его положения.
Это обстоятельство хотя и уменьшит скорость перемещения робота, но позволит
оператору корректировать результаты отработки операций, анализируя данные
об управляющих воздействиях, несмотря на то, что эти данные станут доступны
оператору с задержкой.
Рассмотренная организация системы телеуправления предназначена для наземной
отработки алгоритмов и отладки программного обеспечения научной аппаратуры
для космического эксперимента «Контур 2». На стенде параметры коммуникационной
системы и программного модуля Транспортёр, модифицированы с учётом ограничений,
накладываемых S-band каналом связи, пропускная способность которого оценивается,
исходя из необходимости выполнения условий телеприсутствия, что требует
передавать каждые 2 мс IP пакеты, содержащие 22 байта прикладных данных.
Эти требования позволят модифицировать формат сообщений и учесть свойства,
отражающие специфику сетевых процессов c целью сокращения разрядности поля
нумерации пакетов и меток времени с помощью разделения номеров передаваемых
пакетов на чётные и нечётные. Чётные пакеты используются для передачи изохронного
трафика (5 величин в 32-битном формате с плавающей точкой), нечётные –
для передачи асинхронных сообщений и служебной информации, обеспечивающей
определение параметров канала с реализацией сетевых протоколов и использованием
«облегчённого» стека LwIP.
Согласно требованиям билатерального управления, программное обеспечение
двухконтурной системы телеуправления является симметричным, а именно –
структура программных модулей на стороне ЗМ и робота совпадают. Локальные
контроллеры как ЗМ, так и робота реализованы в виде ПИД-регуляторов и отличаются
друг от друга лишь параметрами настройки.
На рис. 7 приведена структура разработанного программного обеспечения задающего
манипулятора джойстика, для реализации которого используется 32-х разрядный
ARM микроконтроллер.
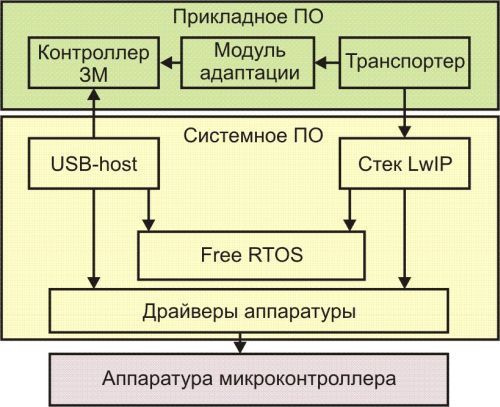
Рис. 7. Структура ПО задающего
манипулятора джойстика
Программный модуль контроллера ЗМ обеспечивает чтение текущих координат
и состояния кнопок джойстика, а также формирование и подачу команд управления
силовым воздействием. Модуль реализует функции ПИД-регулятора, для которого
входная величина и коэффициенты в законе управления формируются программным
модулем адаптации.
Модуль Транспортёра осуществляет регулярный приём и передачу данных из
сети, обращаясь к модулю адаптации для преобразования векторов управления
и телеметрии, а также обработки текущей информации о задержках в канале
передачи данных.
Модуль адаптации осуществляет преобразования, обеспечение устойчивости
замкнутой системы и показатели качества управления. Системное программное
обеспечение ARM микроконтроллера формирует среду исполнения и включает
в себя следующие компоненты: USB-host, LwIP, FreeRTOS, а также набор драйверов
для настройки и использования сетевых интерфейсов.
Модуль Free RTOS используется для обеспечения совместного выполнения задач
перечисленными далее модулями (рис 5, 6):
сервер управления роботом, принимающий команды от ПКУ и формирующий встречный
поток данных для управления 3D-моделью робота и регистрации (режим осциллографирования)
параметров процессов управления;
USB-host, обеспечивающий регулярный опрос координат джойстика и подачу
команд управления силой;
стек LwIP, осуществляющий первичную обработку IP пакетов (контрольные суммы,
подсчёт статистики и пр.) и постановку их во входную очередь программного
модуля Транспортёр;
Транспортёр, обеспечивающий двусторонний обмен изохронными пакетами и асинхронными
сообщениями.
Модуль Транспортёр активизируется
с удвоенной частотой обмена данными, что позволяет вызывать модуль адаптации,
попеременно передавая ему на обработку то вектор телеметрии, полученный
от робота, то вектор управления, полученный от контроллера джойстика.
Результат работы модуля адаптации, соответственно, передаётся контроллеру
джойстика или отправляется по сети объекту управления. Если в нужный момент
времени во входной очереди сообщений нет, то в этом случае модуль адаптации
формирует управляющее воздействие на основе предсказанного с использованием
(3) вектора значения жёсткости виртуальной пружины и скорости перемещения
исполнительного органа робота.
Заключение. Предложена структура киберфизической системы удалённого
силомоментного управления роботом, находящимся на поверхности Земли, с
борта пилотируемой орбитальной станции. Особенностью предложенного решения
является использование двухконтурной системы, в которой «почти аналоговые»
объекты (робот и задающий манипулятор со своими контурами управления) связаны
сетевым каналом с пакетной коммутацией, вносящим переменную дискретность
и существенные задержки доставки информации.
Применение силомоментного очувствления позволяет оператору ощущать не только
состояние управляемого устройства, но и получить информацию о канале передачи
данных, что сигнализирует о возможном небезопасном дальнейшем управлении.
Предложен метод управления и архитектура программного обеспечения для его
реализации. Учитывая особенности рассматриваемой задачи, в качестве операционной
системы для сетевых узлов выбрана свободно распространяемая система реального
времени Free RTOS, позволяющая обеспечить высокую частоту циклов в локальных
контурах управления и обеспечить сетевое интерактивное взаимодействие оператора
с роботом.
Программное обеспечение системы интерактивного телеуправления используется
в билатеральном режиме, как для задающего манипулятора, так и объекта управления,
что позволяет эффективно отрабатывать алгоритмы формирования сигналов сило-моментной
обратной связи для различных вариантов организации сетевой инфраструктуры.
Значительным вкладом в развитие технологий удаленного управления роботами
явилось создание систем управления, основанных на использовании телекоммуникационных
сетей, протоколов пакетной коммутации и организации виртуальных транспортных
соединений.
Так, в 1997 году ЦНИИ РТК был реализован проект удалённого управления через
семь ATM макетом робота-манипулятора для космического корабля «Буран».
В рамках этого проекта были проведены демонстрационные сеансы управления
макетом робота-манипулятора, находящегося на территории ЦНИИ РТК (Санкт-Петербург),
оператором-участником Международного космического конгресса в Турине (Италия).
Дальнейшее развитие технологий удалённого управления с использованием сегментов
открытых глобальных компьютерных сетей было проведено специалистами ЦНИИ
РТК в рамках космического эксперимента «Контур».
Полученные результаты стали наглядным подтверждением возможности применения
сетевых подходов к управлению не только отдельными устройствами, но и распределенными
робототехническими комплексами, применение которых имеет большие перспективы
при организации межпланетных экспедиций и реализации сложных операций по
сборки конструкций в космосе.
Отличительной особенностью этих экспериментов стало развитие методов защиты
информации и робастного управления при передаче данных в условиях хаотических
задержек и спорадических возмущений. Полученные результаты стали наглядным
подтверждением возможности применения сетевых подходов к управлению не
только отдельными устройствами, но и распределенными робототехническими
комплексами, применение которых имеет большие перспективы при организации
межпланетных экспедиций и реализации сложных операций по сборки конструкций
в космосе.


Рис. 8. Оборудование бортового
сегмента
Следующим этапом должен стать космический эксперимент (рис. 8) «Отработка
технологий телеуправления на планетным и роботами с орбитального космического
аппарата» (шифр «Контур-2»). В ходе эксперимента планируется регистрация
информации двух типов: визуальной и телеметрической. Качество регистрируемой
информации определяется ограничениями канала космической связи S-band:
пропускная способность восходящего потока данных (с Земли на МКС) – 256
кбит/с, пропускная способность нисходящего потока данных (с МКС на Землю)
– 4 Мбит/с.
Для передачи команд управления роботами необходимо использовать нисходящий
поток данных, для передачи данных телеметрии и визуальной информации –
восходящий поток данных. При этом для передачи данных телеметрии планируется
использовать часть полосы пропускания восходящего потока шириной 128 кбит/с,
для передачи визуальной информации – часть полосы пропускания восходящего
потока шириной 128 кбит/с.
Настоящая работа подготовлена по материалам договора № 13.G25.31.0026 между
ОАО «РКК «Энергия» и Минобрнауки России, выполняемого с участием СПбГПУ
и гранта РФФИ № 13-07-12106.
Список литературы:
1. В.С. Заборовский,
М.Ю. Гук, В.А. Мулюха. «Применение киберфизического подхода в задачах сетецентрического
управления роботами» //Робототехника и техническая кибернетика. - 2014.
- №2(3). - С. 12-18.
(Электронная версия в формате
PDF:
http://www.rusrobotics.ru/images/docs/2014-2-pdf/2014-2_1-2.pdf)
 В
оглавление
В
оглавление