
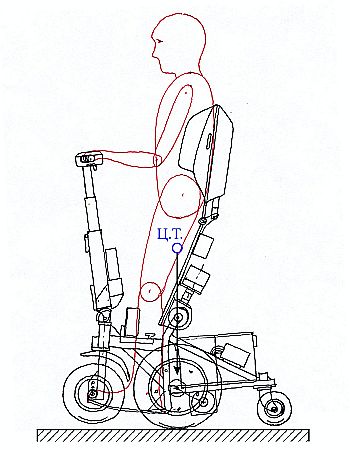
Рис. 1. Диан Кеймен со своим медицинским аппаратом Independence 3000 IBOT Transporter (США) в гиростабилизированной конфигурации на двух точках опоры (основная опция)

Рис. 2. Японская полиция никак не наиграется в американские Segway – лошадки [1]
“Гиростабилизация” – это про систему автоматической стабилизации вертикального положения (с опорой на два соосных колеса, в связи с чем речь о “продольной плоскости”), на основе гироскопических датчиков и исполнительных электромеханических приводов.Пионером смелого решения применять на индивидуальном наземном транспорте особо малого класса гиростабилизацию и перемещаться, за счет этого, не на 4-х и даже не на 3-х колёсах (что достаточно устойчиво и без стабилизации (разумеется, не при чрезмерном возвышении центра масс) а всего на двух соосных, как это всегда проделывали цирковые эквилибристы на одноколесных велосипедах за счёт своей физиологической системы стабилизации и “мышечных исполнительных “приводов”, можно считать американского изобретателя-бизнесмена Диана Кеймена. На стыке последних столетий он создал сначала медицинский аппарат IBOT (рис 1), а затем (когда он не прошел “фильтр” медицинской сертификации, – Т-образный Segway (рис. 2).
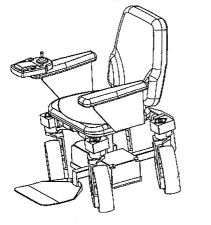
При “откате” технической мысли вновь к реабилитационной технике, да и вообще к удовлетворению пожеланий вполне ещё здоровых потенциальных пользователей аппаратов, стали пытаться “посадить пользователя на мягкое место”, на базе аппарата Segway. Вот здесь-то приоритет оказался у отечественного лидера в области скутерно-реабилитационной техники нового поколения – Лаборатории Электродвижения при СПбГПУ (рук. А.Д.Элизов) – основного конкурента Д. Кэймена. Уже на ранних этапах развития идеи гиростабилизации малоразмерных транспортных средств сотрудники Лаборатории, во-первых, пришли к необходимости гиростабилизации независимо от Д. Кеймена в связи с предельным уменьшением колёсной базы в стремлении к высокой компактности и маневренности, и, во-вторых (в отличие от американского конкурента), чётко видели оборотную сторону концепции стабилизации как базовой опции и пошли по пути сохранения трёх- или четырёхколёсного шасси с гиростабилизацией как опцией дополнительной. Ими ещё в 2003–2004 гг. была отработана такая альтернативная концепция продольной гиростабилизации на ряде ходовых макетов трансскутеров семейства “Кенгуру” (рис. 3).И вслед за этим – целые “косяки” аналогов и с запада, и с Востока!
А вот чтобы у двухколейных транспортных средств – поперечная стабилизация, как у грузинского трактора…Ну так посмотрим через Всемирную паутину на закордонных коллег: чем они нас удивят?


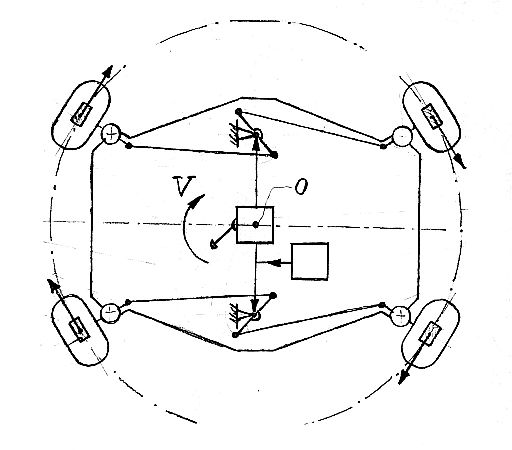
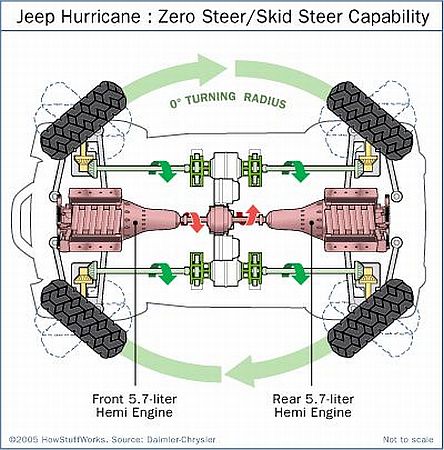
Для малогабаритных машин и транспортных средств особо малого класса с электрическими мотор-колёсами реализовать такие схемы можно независимым поворотом каждого колеса (при наличии индивидуальных, на каждое колесо, электромеханических приводов их поворота – см. рис. 7, 8).Оба этих способа защищены российскими патентом и авторским свидетельством с участием авторов данной статьи [6, 7].
 Движение боком |
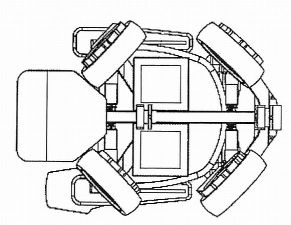 Схема поворота на месте (в плане) |
 На выставке в г. Дюссельдорфе |
 Сертификат, выданный в 2005 г. трансскутеру “FLIP” – единственному из 80 российских экспонатов Всемирной выставки |

В компенсацию нанесённого этими материалами морального и, возможно, психического ущерба особо чувствительным читателям, отметим в заключение, что авторы в сочувствующе поддерживающей атмосфере Редакции, готовы сказать и хорошее: А давайте-ка посмотрим на всё это под другим углом зрения.Параллели-то наши, обратите внимание, – с крупнейшими развитыми странами! Это в наших-то российских традициях, в сегодняшних экономической, “инновационной” ситуации и политике (фактической, а не декларируемой с чиновниками с высоких трибун под рукоплескания “пятой колонны”)!
Радует, что за истекшие после выхода упомянутой первой статьи три года в Редакцию не поступило ни одной статьи под заголовком, скажем, “Российско – Эфиопские параллели в науке и технике” или “Российско – Нигерийские параллели…”. Стало быть, не всё ещё потеряно, есть резервы!Источники информации